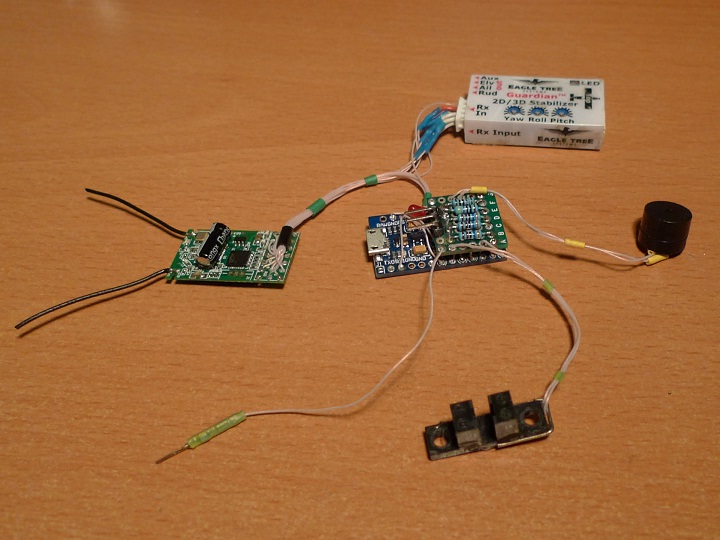
Статья является продолжением Стабилизация крыла HK Mini-Sonic. В ней обсуждается самая сложная часть изготовления устройства - монтаж контроллера пропеллерного датчика.
Подготовка.
- Основные элементы используемые в этой конструкции должны быть хорошо изучены. Модель (в данном случае MiniSonic) облетана, стабилизатор полета (Guardian Eagle Tree) испытан, настроен и так же облетан на этой же модели до уровня, когда пилот хорошо понимает, зачем нужна вся эта бодяга с датчиком скорости.
- Нужно уметь паять и иметь в распоряжении хороший термостабилизированный паяльник или паяльную станцию - в процессе сборки нужно будет запаять около 100 соединений очень тонким проводом (я пользуюсь китайским паяльником GS90D).
- Понимать основы электроники, иметь тестер и, обязательно, осциллограф. И, конечно, уметь пользоваться этими приборами (сам я предпочитаю старые осциллографы с электронной трубкой, у меня ОСУ-10В. Цифровые осциллографы, конечно лучше и дешевле, но для меня они какие-то "бездушные").
- Программирование - нужно понимать базовые принципы программирования Arduino. Знать, что такое регистры, таймеры, прерывания и уметь скомпилировать и залить программу в контроллер.
Если все пункты подготовки прошли успешно и желание еще осталось - тогда вперед :)
Почему так много пайки и почему такие сложности?
Дело в том, что для использования схемы с крылом MiniSonic, нужно уложиться в вес 30 г, а разъемы и толстые провода весят относительно много. Поэтому в многокомпонентном контроллере большая часть разьемов будет заменена паянными соединениями, что уменьшает вес и так же увеличивает надежность. Радиотехника - наука о контактах.
Предупреждение.
Нужно понять, что данная разработка требует достаточной квалификации и понимания при изготовлении, и просто копированием изготовить устройство вряд-ли удастся - всегда что-то пойдет не так, что-то сломается и надо будет искать пути разрешения проблем. Поэтому, перед тем как делать контроллер - трезво оцените свои силы и, если есть какие-либо сомнения, то произведите еще раз подготовительный цикл :). С другой стороны, у данного устройства есть и преимущества - здесь практически нет аналоговых компонентов - цифровой пропеллерный стабилизатор практически не нуждается в наладке, что не скажешь об электронике бародатчика трубки Пито.
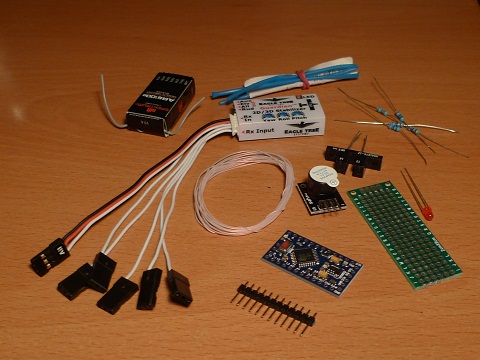
Необходимые материалы:
- стабилизатор Guardian Eagle Tree - в постоянное использование - соединительный шлейф будет кастомизирован (впрочем, в интернет магазинах есть запасные шлейфы для этого устройства).
- Аэродинамический датчик скорости, изготовленный по материалам статьи и используемая здесь опто-пара (HOA 1874-012).
- плата Arduino Pro Micro - продается на Алиэкспрессе и Бангуде (перед покупкой внимательно читаем описание - нам нужна модификация платы с micro-USB, а в продаже так же существует очень похожая дешевая модификация c mini-USB - она в полтора раза больше размером и в два раза тяжелее).
- 6-ти канальный приемник в постоянное использование (будет припаян напрямую к схеме). Я испытывал сначала 6-ти канальный приемник HK TR6A V2, затем клон Spectrum-а AR6100e, который сложнее в настройке, но меньше весом и лучше защищен от помех.
- Небольшой фрагмент макетной платы, чтобы сделать навесную панель.
- Многожильный провод во фторопластовой изоляции МГТФ, лучше 0.05 мм или, если такого нет, то 0.12 мм диаметром, всего около 2 м. Такой провод продается на рынках и в популярных магазинах радиодеталей типа Чип-и-Дипа. Почему именно МГТФ? Провод имеет тонкие и гибкие медные жилки, а фторопластовая изоляция очень прочна и не плавится от прикосновений жала паяльника. Я не рекомендую здесь использовать провода другого типа - МГТФ-ом были смонтированы большенство советских спутников и самолетов.
- Активный зуммер - 12 мм в диаметре (на Алиэкспрессе ищется, как "active buzzer alarm 5V sounder").
- Светодиод (любой индикаторный).
- Комплект резисторов, приведенных в схеме номиналов.
- Термоусадочные трубки: диаметром 1.6 мм около 20 см, диаметром 6 мм около 2 см, а так же (опционально) 5 см отрезок трубки диаметром 20 мм для обтяжки регулятора двигателя.
- Влагоизоляционный лак PLASTIK-71.
- Толстая двусторонняя клейкая лента шириной 1 см.
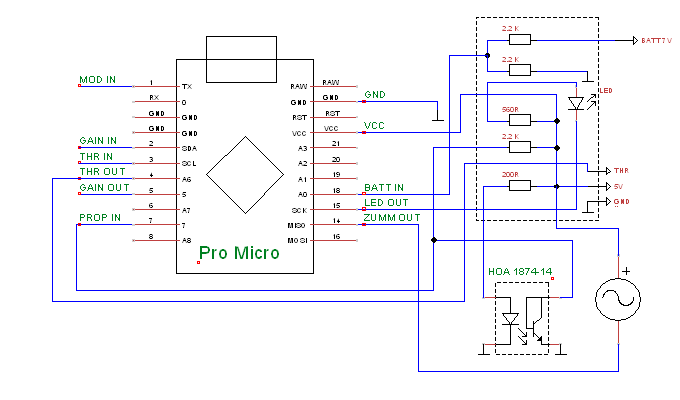
Схема соединений:
На схеме показаны только "внутренние" соединения контроллера - платы Ардуно с другими компонентами. Схема питания, сам Guardian, регулятор двигателя и сервомоторы элеронов модели не обозначены - они подключаются к выходам Guardian напрямую стандартным образом. Обозначения и назначения сигналов:
- Сигналы поступающие с приемника: GAIN IN, TRH IN, MOD IN.
- Сигналы идущие на Guardian: GAIN OUT, так же с приемника сигнал MOD IN (режим работы стабилизатора).
- Сигналы поступающие на контакты разъема регулятора тяги модели GND, VCC(5V), THR OUT.
- Активный зуммер подключен к 5V и ZUMM OUT.
- К оптопаре подключены: GND к светодиоду и фотодиоду, 5V через сопротивление 200 Ом на светодиод, 5V через сопротивление 2.2 КОм на фотодиод. Сигнал с фотодиода так же идет на цифровой вход платы Arduino - PROP IN (Arduino будет считать импульсы и по их частоте определять скорость воздушного потока).
- Аналоговый сигнал BATT IN формируется делителем на двух сопротивлениях 2.2 КОм. Вход делителя подсоединеннх к 1-пиновому щупу BATT 7V, который будет воткнут в балансировочный разъем батареи. Напряжение BATT IN будет измерено АЦП Arduino и разряд батарейки будет сигнализирован импульсами зуммера.
Вариации.
Конечно, компоненты можно варьировать. Вместо MiniSonic можно использовать какое-нибудь другое небольшое крыло, вместо Guardian EagleTree стабилизатор FY-40A, оптопару тоже можно взять другую, разъемы приемника не удалять и т.д., здесь я описываю изготовленную конструкцию. Замены надо производить осмысленно - в схеме есть и критичные элементы, например, в качестве платы Arduino подходят только клоны Arduino Leonardo. Популярные Arduino Nano и Uno использовать нельзя - у них меньше аппаратных прерываний, чем нужно для работы стабилизатора. У платы Arduino Mega прерываний достаточно, но программируются они по-другом.
Теперь поговорим о технологиях:
Удаление изоляции с провода MГТФ.
Существует много приемов зачистки концов провода МГТФ. Погуглите интернет по этому поводу - тема очень важная и популярная. Я использую прецизионный cтриппер Engineer PA-14. Так же у неплохо у меня получается обжигать изоляцию на концах провода пламенем турбинной зажигалки (обычная коптит), но тут надо избегать вдыхать продукты сгорания фторопласта. Использовать скальпель, тонкие бокорезы для провода диаметром 0.05 мм у меня не получалось - операция требует невероятной сноровки.
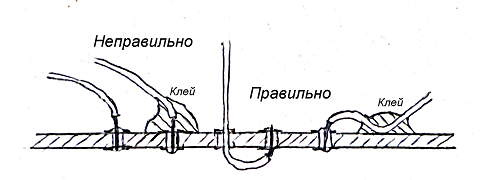
Крепление концов проводов.
Одно из популярных ошибок монтажа проводом MГТФ - плохое закрепление концов провода, и как следствие, вероятный обрыв провода в месте отреза изоляции из-за остаточной деформации, сгибов и вибрации - здесь особенно страдают тонкие провода, нужно закреплять провод. В общей сложности существуют 2 типа соединений:
- В случае внутриплатных соединений провод достаточно приклеить его изоляционным лаком (PLASTIK 71 вполне подходит).
- В случае межплатных соединений, шлейфов для внешних устройств, требуется более серьезная защита - механическая нагрузка должна быть перенесена с конца провода на фторопластовую оплетку. Провод можно защитить как продеванием через отверстие платы, так и приклеить каплей клея. Не нужно только капать клей на сам контакт - он будет мешать ремонту соединения.
Пайка
Чтобы не разводить грязь, надо стараться паять такие мелкие схемы с минимальным количеством флюса. Если вы используете проволочный припой - вам вполне должно хватить флюса, который содержится внутри. Старайтесь не греть контактные площадки платы Arduinon паяльником более 10 - 15 сек - гетинакс и медные дорожки могут разрушиться. По этой же причине не припаивайте много проводов к одной контактной площадке. Используйте специальную губку для вытирания жала паяльника.
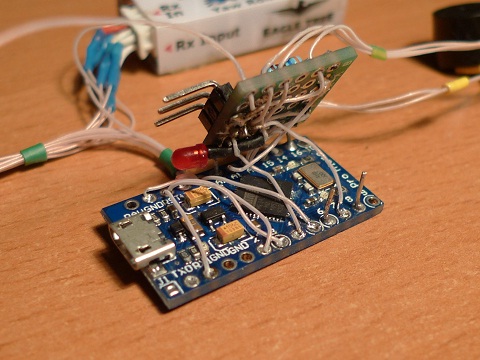
Изготовление добавочной панели.
Электронные компоненты типа резисторов, светодиодов, разъемов лучше не припаивать к плате с Arduino - она не расчитана на такие дополнения. Эти компоненты надо смонтировать отдельно, на добавочной панели, которая делается из кусочка обычной макетной платы. Здесь так же расположите 3-х пиновый разъем для подсоединения регулятора скорости двигателя модели - его можно сделать из гребенок контактов, которые входят в комплект платы Arduino.
Крепится добавочная панель на 4-х ножках из облуженной проволоки, которые вставляются в соответствующие отверстия платы Ардуино. Две ножки припаиваются сразу, две оставшиеся только тогда, когда устройство будет 100% собрано и настроено.
Подготовка и подключение приемника.
Для обеспечения легкости, надежности и компактности конструкции мы будем использовать приемник с удаленными разъемами сервомоторов. Приемник перед монтажом надо забиндить на передатчик (потом эта операция будет требовать пайки). Корпус с приемника следует снять, контакты разъемов перекусить кусачками и выпаивать ножки разъема одну за одной.
- Как правило, у приемника оставленного без корпуса, очень ненадежно место крепления антенны (или 2-х антенн) и есть вероятность повредить антенны даже во время испытаний. Поэтому, контакты антенн нужно укрепить капелькой клея или сделать им защиту из пластмассовой трубки подходящего диаметра, которую надо надеть на антенну и приклеить к плате приемника.
- Если использовать приемник HK TR6A V2, то у него на антенне расположен тяжелый трубчатый "противовес". Его нужно аккуратно нагреть зажигалкой, отпаять и снять с антенны, оставив 32 мм неэкранированного провода в качестве приемного элемента - вопреки опасениям, эта операция незначительно ухудшит чувствительность.
Внизу, на снимке, показана распайка контактов приемника AR6100e.
Подсоединение стабилизатора Guardian.
Стандартно Guardian подсоединяется к приемнику с помощью соединительного шлейфа-кабеля, находящегося в комплекте стабилизатора. Проблема в том, что комплектный соединительный кабель сам по себе достаточно тяжел и габаритен, поэтому предлагается заменить провода кабеля на шлейф из проводов МГТФ-0.05 и припаять его к приемнику без использования серво-разъемов. Двухрядный 8-пиновый разъем Guardian нестандартный, сложно найти ему замену, поэтому его мы оставляем, но провода отрезаем на расстоянии около 1 см от разъема и удлиняем до нужной длинны МГТФ-ом (Перед модификацией записать назначения всех контактов разъема!).
В принципе, можно обойтись и без этого разъема - соединительные МГТФ провода легко припаять и непосредственно к контактным площадкам на плате самого стабилизатора, но я пока не решился на эту меру, и Guardian сейчас является единственным съемным элементом контроллера.
Для жгутовки соединении приемника с Guardian удобно использовать термоусадочную трубку 6 мм. Колечки трубки надеваются на шлейф из МГТФ проводов в процессе его формирования и, после нагреваются пламенем зажигалки - термоусадочная трубка сожмет провода в один "жгут".
Подключение зуммера и оптопары.
Монтаж так же производится МГТФ проводом - к ножкам устройств припаиваются провода и соединения изолируются отрезками термоусадочной трубки. Зуммер активный - при его подключении надо помнить о полярности, перед припайкой испытав зуммер от батарейки. Провода объеденяются в шлейфы и тоже жгутуются 2 мм колечками термоусадочной трубки.
Покрытие водозащитным лаком.
Как показали испытания, схемы на основе Arduino практически беззащитны к попаданию воды, которая замыкает контакты и быстро выводит контроллер из строя. Без влагозащиты контроллер не будет работать во влажную и холодную погоду. Для влагоизоляции я использую лак PLASTIK 71. Все открытые элементы конструкции (Arduino, добавочную панель, приемник) надо покрыть 3 слоями лака, высушивая каждый слой в течении часа. При покрытии следить, чтобы лак не попал на разъемы.
Улучшение штатного регулятора тяги MiniSonic.
Комплектный регулятор тяги модели полезно доработать:
- он собран на полевых транзисторах и очень чувствителен к влаге, так же требует покрытия лаком PLASTIK 71 (регулятор обрабатывают, предварительно сняв изоляцию из термоусадочной трубки).
- по непонятной мне причине, в штатом регуляторе MiniSonic отсутствует электролитический конденсатор, фильтрующий помехи в цепи напряжения. Из-за этого, генерируемые сервомоторами импульсные наводки могут повлиять (и в действительности влияют) на работу электроники гироскопа-стабилизатора и приемника. Чтобы устранить эту проблему, электролитический конденсатор номиналом около 100 mkF 12V припаивается к контактам разъема батарейки так, как это сделано в большенстве стандартных регуляторов тяги.
После всех этих улучшений на регулятор вновь устанавливается изоляция из отрезка 20 мм термоусадочной трубки.
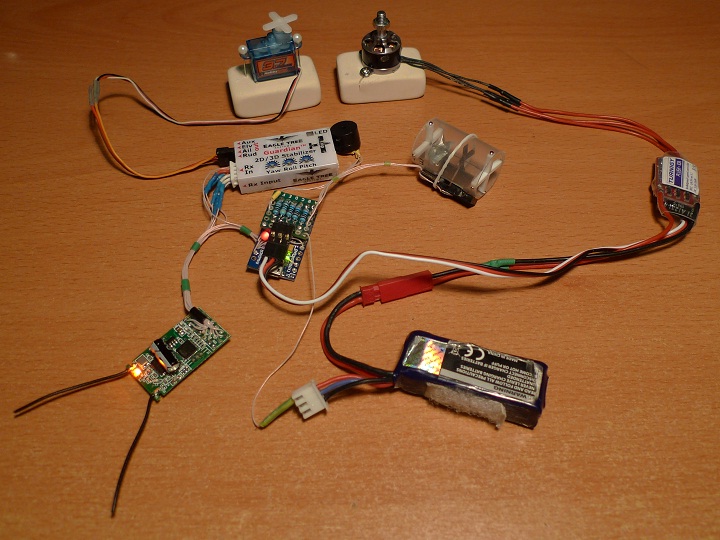
Стенд для настройки стабилизатора.
Испытывать и настраивать контроллер, установленный в модель, крайне неудобно, поэтому, лучше потратить несколько минут и построить стенд для отладки стабилизатора. Двигатель MiniSonic лучше временно снять с модели и закрепить на подходящей подставке таким образом, чтобы мотор мог устойчиво работать. Для контроля работы стабилизатора надо взять любой подходящий сервопривод и так же закрепить его вертикально. Потом подсоединить все остальные компоненты устройства.
Предварительная проверка.
Итак контроллер готов - начинаем ее испытывать. Как можно увидеть по схеме, все компоненты питаются напряжением 5V, поступающим с регулятора тяги модели. Перед подачей питания еще раз проверяем полярность и тестером "прозваниваем" провода питания на всех компонентах. Ошибки при подсоединении питания могут дорого стоить.
Подсоединяем батарейку - светодиоды на Ардуино, Guardian-е и приемнике должны загореться - сигнализируя о том, что питание подано правильно.