Лето близится, водоемы начинают освобождаться ото льда и скоро можно будет проводить время не только в полях, но и у водоема.
Для развлечения у воды можно изготовить гидрошнягу
или сделать
А можно установить поплавки на любую авиамодель и взлетать с воды, крутить пилотаж над озером и садиться обратно на воду.
Поплавки фабричного производства стоят достаточно много, примерно треть а то и половину стоимости авиамодели.
Как я понимаю – это чисто маркетинговый ход. Поплавки то не шасси, с плохими авиамодель может и утонуть, а значит и велик шанс потерять не только саму авиамодель, но может от воды сгореть электроника авиамодели. Так же фабричные поплавки могут иметь колесики для выезда на сушу или посадку на асфальт.
Впрочем, не все так страшно и накладно, можно изготовить поплавки для авиамодели самостоятельно. А колесики - это просто опция, необходимость которой весьма сомнительна.
В конце статьи ссылка по которой можно скачать программы расчета поплавков и крыла авиамодели.
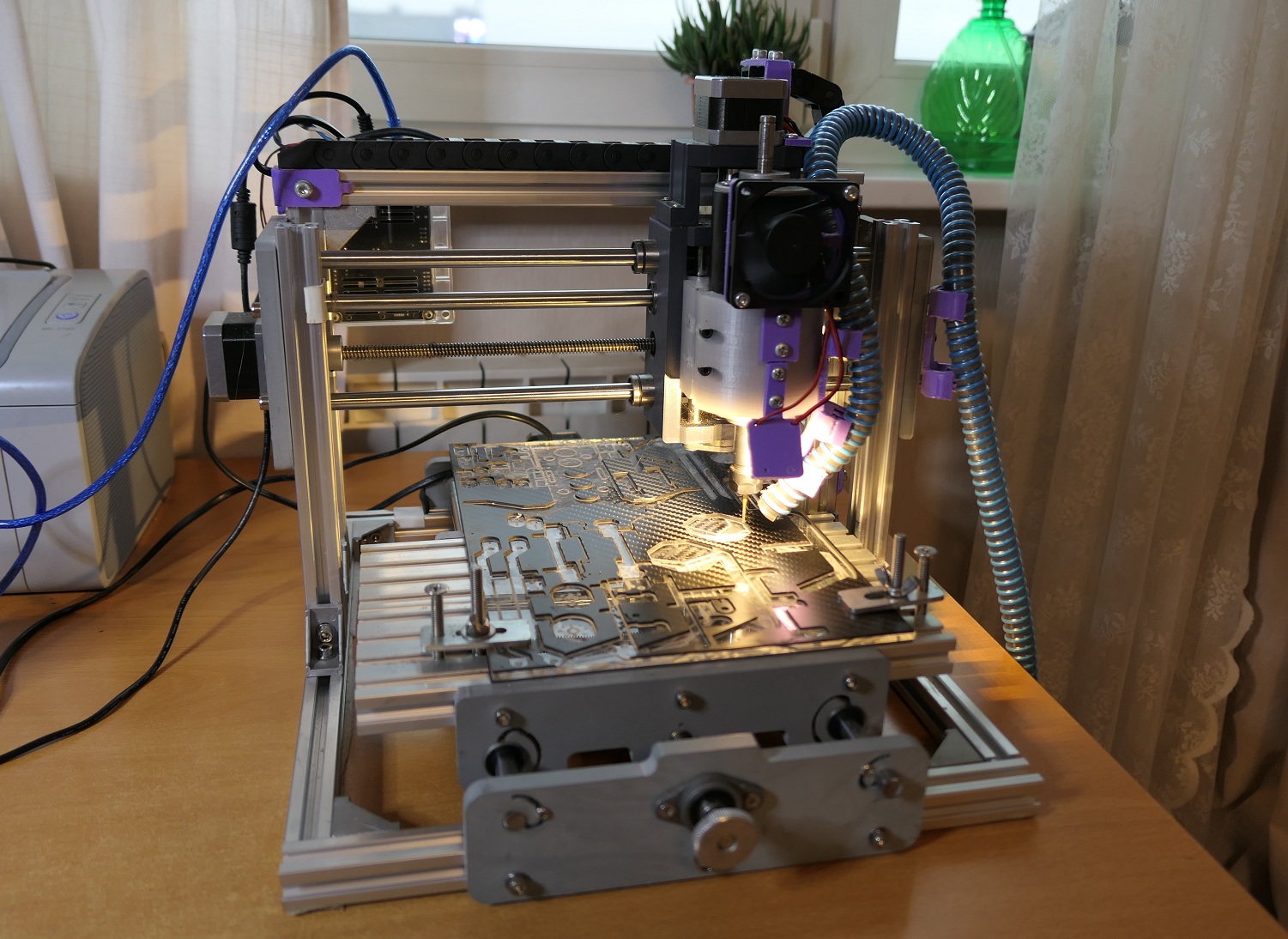
Полтора года назад я купил на алиэкспресе фрезерный СNC станок и доработал его. Это я уже описал в статьях "Режем карбон" 1, 2, 3. Теперь уже можно проанализировать эксплуатацию и сделать выводы.
Улучшенный смеситель каналов для пилотажного крыла
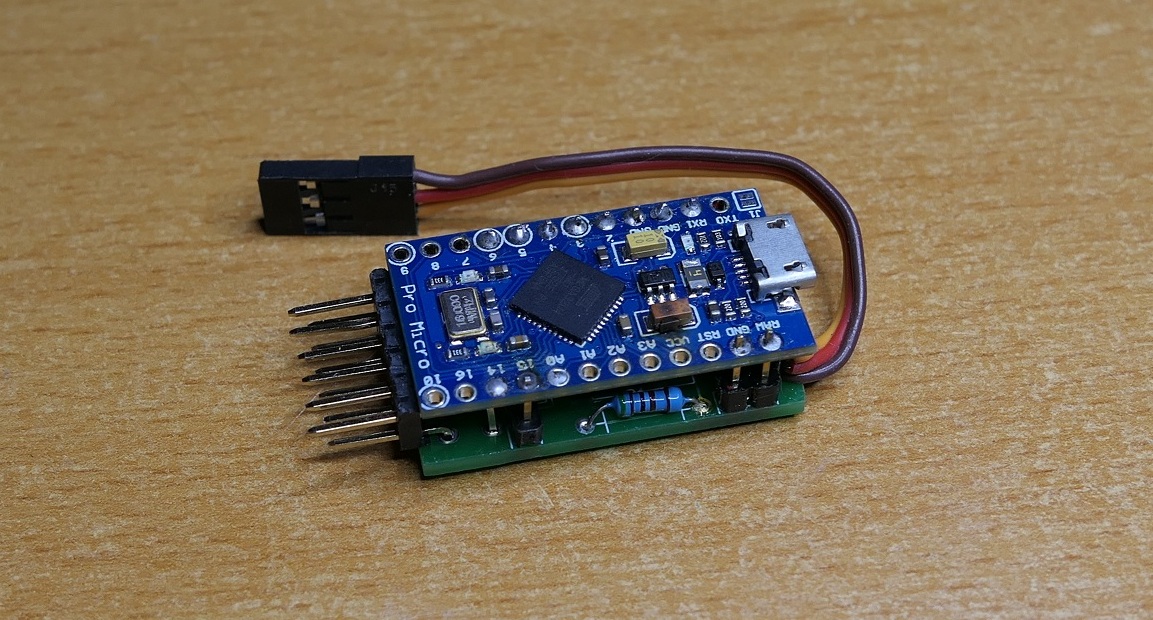
Я сейчас увлекаюсь разработкой 2-х моторных пилотажных моделей. Такие модели имеют нестандартную схему управления - из-за наличия 2-х двигателей они несколько похожи на квадрокоптеры и нуждаются в гироскопах-стабилизаторах. Но 2-х моторную модель нельзя подключить напрямую к стабилизатору полета и для таких моделей я изготавливаю отдельный смеситель сигналов на Arduino Pro Micro, про который уже написал несколько статей. Последняя версия смесителя использует стабилизирующий приемника FrSky-S8R, смесители этого типа отлетали в сумме несколько десятков часов на различных моделях и хорошо себя показали. Но вместе с этим у смесителя были обнаружены некоторые недостатки:
Когда что то отлаживаешь на базе современных микросхем, то осциллограф - вещь незаменимая!
Если этим занимаешься постоянно - то лучше купить хороший и не дешевый, а вот если что то делаешь время от времени и несерьезно, то покупать прибор, который будет только место занимать 90% времени - жаба душит.
И правильно эта жаба делает!
Ведь есть целый раздел софта называемый Osciloscope Audio.
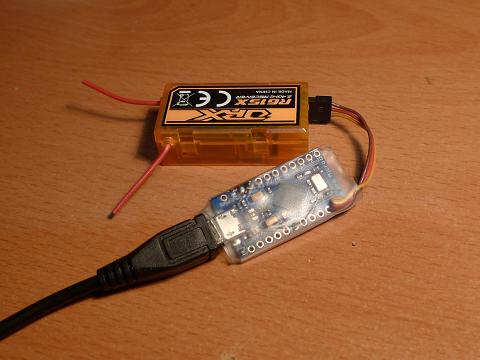
Недавно в продаже появились дешевые RC приемники, которые вместе со стандартными выходами сигналов сервоприводов, выдают так же композитный PPM сигнал. Для бортовой электроники это, в некотором смысле, революционное явление, потому что композитную PPM гребенку гораздо проще обрабатывать, чем 6-8 отдельных импульсных сигналов сервоприводов. Такой приемник может быть удобно подключен к периферийным устройствам с помощью только одного 3-х жильного кабеля и серво разъема, по которому так же передается напряжение питания.
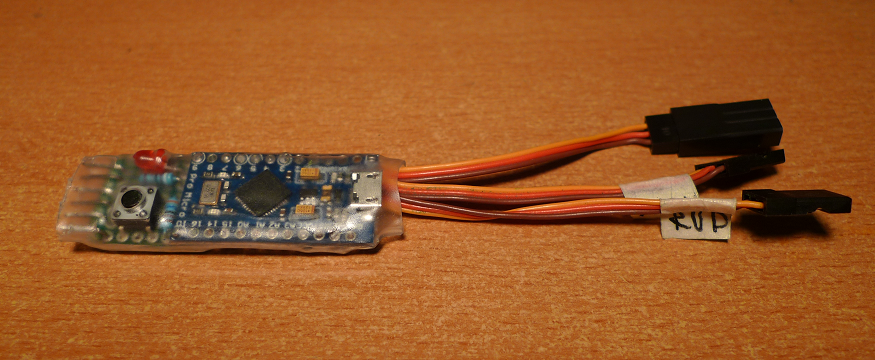
Традиционно двигатели двухмоторной модели управляются смесью сигналов Thr (тяги) и Rud (руля направления). Как показывает опыт, сделать оптимальное замешивание этик сигналов непосредственно в пульте управления очень непросто. В дешевых пультах управления обычно отсутствуют необходимые функции, а в более сложных реализациях прошивок, типа OpenTX такое замешивание требует установки большого количества параметров и большого количества вычислительных ресурсов для формирования сигналов при работе пульта. Поэтому, иногда бывает целесообразно изготовить "специализированный" контроллер-миксер на основе платы Arduino и разместить его непосредственно на модели.
Стандартное (аддитивное) замешивание сигналов
Попробуем проанализировать картину замешивания сигналов. При управлении тягой двигателей 2-х моторной авиамоделью традиционно формируют сигналы управления двигателями, как сумму и разность сигналов Thr и Rud.
Практически все мы, собравшиеся на сайте Радиоуправляемые Авиамодели, пользуемся такой вкусной штукой, как дешевая покупка деталей для радиоуправляемых моделей в Китае.
Те, кто не покупает в Китае, они покупают в Штатах или в Фатерлянде, но суть не меняется - практически все хоббийные вещи в забугории стоят минимум в 2 аза дешевле, чем в магазинах хоббийной тематики в России.