Я живу почти в центре большого города, и как многие москвичи, так и не завел автомобиля. Доставка моделей на аэродром для меня всегда связана со сложностями, обычно выручают друзья-автовладельцы. Это не могло не повлиять на мои привязанности. У меня есть несколько среднеформатных электролетов, но рядом с домом на них летать негде, а на метро их везти сложно, и поэтому, любовь к малогабаритным моделям у меня давно.Традиционно, маленькие модели показывают далеко не лучшие летные характеристики и не так интересны в полете, как на модели больших и средних размером. Поэтому, я задался вопросом - как улучшить пилотажные свойства "мелколетов" и сделать их пригодными к запуску на маленьких (диаметром 30 - 100 м) площадках в парках и дворах. Решить проблему было не просто, но я все же нашел интересные решения.
Проблемы устойчивости маленьких моделей.
Всем известно, что маленькие модели (размах крыльев менее 60 см) очень подвержены потери устойчивости, даже при незаметных порывах ветра - микро пленко- или пено-летами, которые показывают чудеса пилотажа в помещениях, практически невозможно управлять на улице. Проблемными параметрами здесь являются их легкость и низкая пилотажная скорость, которая часто бывает ниже скорости даже незаметного ветра. Поэтому, на улице используются мелколеты с другими характеристиками. Какие решения традиционно используются для улучшения пилотажных качеств маленьких моделей?
- можно повышать массу модели и, соответственно, крейсерскую скорость - управляемость заметно улучшится, но модель станет быстрой, потенциально опасной для людей и будет требовать бОльших размеров летного поля для маневров.
- можно повышать управляемость за счет собственной устойчивости - т.е. баловаться с верхнепланами типа "Цесна". Такие модели есть, они хороши для новичков, но неуклюжи в полете и неинтересны для опытных пилотов.
Какие параметры предпочтительны для "городского" парколета?
- Размах крыльев 50 - 80 см. Такая модель легко перевозится в коробке.
- Пилотажная горизонтальная скорость 20 - 30 км.ч. Модели, летящие с большой скоростью, опасны для случайной публики и требуют бОльших площадок.
- Масса 100 - 250 г. Этот параметр связан с низкой скорость сваливания, так же небольшая масса обеспечивает безопасность полетов.
- Расположение пропеллера - желательно заднее (или центральное). Обеспечивает безопасность столкновений.
- Расположение крыла - центроплан. Верхнепланы мало интересны для пилотажа.
Первые попытки стабилизации.
Несколько лет назад мне попался на глаза относительно недорогой ($70), 6-ти осный (возможность 2D и 3D стабилизация, 30г) и более-менее легкий (не помню уже, около 25г кажется) гироскоп-стабилизатор полета FY-30A. Я купил его и установил на относительно скоростное "треугольное" летающее крыло с массой 300 г и размахом крыльев около 60 см. И хотя стабилизатор существенно утяжелил модель, но и также заметно повысил ее устойчивость. Аэродинамическая скорость сваливания крыла уменьшилась до примерно 25 км, пилотаж стал выполняться четче. Гироскоп так же стабилизировал курс - появилась возможность управлять моделью на расстояниях 200 - 300 м, когда ориентация модели уже практически не читалась визуально. Устойчивость к порывам ветра тоже заметно усилилась - модель стала управляема при ветре 15 - 30 км.ч. Таким образом установка стабилизатора полета сделала модель гораздо более интересной для управления - более медленной и устойчивой.
Так как крыло было разборное, оно паковалось в относительно небольшую коробку, это позволило мне не только летать в городе, но и брать его с собой в отпуск на море. Там получались замечательные горизонтальные полеты вдоль пляжей на расстояния ограниченные лишь видимостью модели. Но для полета в парках модель все же оставалась слишком быстрой и тяжелой, размер площадки удобной для ее запусков я бы оценил как 100 - 150 м.
Проблемы стабилизированной модели.
- В ходе нескольких экспериментов я нашел, что совсем дешевые легкие 3-х осные стабилизаторы плохо работают с маленькой моделью - они не достаточно быстрые, и не тем более не имеют режима стабилизированного горизонтального полета (2D). Хорошие и дорогие 6-ти осные стабилизаторы-автопилоты часто бывают тяжелыми (30 - 100 г.), и поэтому надо искать компромисс.
- Для всех стабилизаторов коэффициент стабилизации нужно менять в зависимости от аэродинамической скорости модели: на малых скоростях стабилизация должна быть максимальной иначе модель потеряет устойчивость и "свалится", при повышении скорости ее надо уменьшать - здесь модель начнет самовозбуждаться - "раскачиваться". Это ожидаемое и хорошо известное свойство стабилизатора - для контроля коэффициента усиления обычно используется отдельный канал передатчика, связанный с одним из потенциометров пульта. Оператор должен научиться изменять коэффициент стабилизации в зависимости от условий полета. Понятно, что для 2D полета на минимальной скорости и для исполнения фигур пилотажа стабилизация должна быть разной.
- Для переключения режимов стабилизации удобно задействовать отдельный канал, соединенный с трех-позиционным переключателем на пульте (позиции: 3D, без стабилизации, 2D). Таким образом, для полноценного управления стабилизированным крылом необходимо задействовать 5 каналов, а для модели с хвостом - 6 каналов передатчика.
Улучшение характеристик модели.
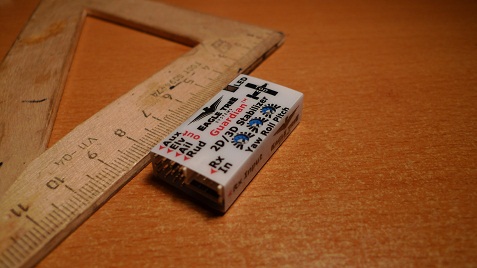
Мой первый стабилизатор оказался не очень надежным и долговечным и, примерно, через год у него стали ухудшаться параметры. На замену ему я купил относительно недорогой и компактный стабилизатор Guardian фирмы Eagle-Tree, он обладал всеми характеристиками предшественника, но его чистый вес (без проводов) составлял всего около 10 г! Появилась возможность экспериментов с более легкой моделью. Для этой цели было куплено очень маленькое крыло HobbyKing Mini-Sonic с размахом крыльев 59 см и рекомендованным полетным весом 110 - 130 г. Вес этого крыла без радиооборудования и батарейки составляет всего около 85 г что дает возможность установить на него 20 г двух-баночной батарейку и около 25 г бортового оборудования. Имеющиеся в интернете обзоры не очень высоко оценивали этот уличный микролет - говорилось, что крыло устойчиво летает на скоростях более 30 км/ч и что запускать его лучше в маловетреную погоду. Все сказанное не очень радовало, но здесь я понимал, что у меня есть уникальные возможности для его улучшения.
Переделка не заняла много времени - как и ожидалось, установка стабилизатора заметно улучшило летные качества крыла - при полном безветрии скорость сваливания удалось уменьшить почти до15 км/ч, а при увеличении крейсерской скорости оно стало летать при ветре 20 - 30 км в час, при этом прекрасно выполняя как горизонтальный полет так и фигуры высшего пилотажа. Такую модель действительно можно запускать в парках - маленький размер и низкая скорость делают полеты "психологически безопасными" - прохожие не шарахаются, а наблюдают за ней, как за игрушкой. Транспортировка Mini Sonic-а так же удобна - крыло легко переносится в своей же продажной коробке (60 х 40 x 6 см), где надо прорезать небольшие отверстия для вертикального хвостового оперения.
После нескольких месяцев полетов, я стал искать дальнейшие методы улучшения характеристик модели. Возник вопрос - можно ли избавиться от необходимости постоянно крутить ручку на пульте и производить настройку усиления стабилизатора? Теоретически можно - нужно всего лишь установить датчик скорости и, как-то преобразовать его показания в импульсный сигнал управления усилением гироскопа-стабилизатора. Проблема только в одном - такой "контроллер скоростного режима" должен быть очень легким. Размышления над оптимизацией веса оборудования Mini Sonic показывали, что агрессивными действиями (заменой приемника на более легкий, толстых проводов на тонкие, уменьшения количества разъемов) можно еще освободить 10 - 15 г. веса для дополнительного оборудования.
Изготовления датчика скорости.
Я знал, как сделать контроллер посылающий управляющий стабилизатором сигнал - подходящим устройством являются платы Ардуино, которые так продвинулись в миниатюризации, что самые маленькие из них уже весят менее 10 г. А вот что делать с датчиком аэродинамической скорости? Единственно ивестным мне датчиком скорости, применяющимся в авиамоделизме, на тот момент являлась трубка Пито. Но здесь меня ждало разочарование - все имеющиеся в продаже варианты этого устройства (например, трубка Пито от Eagle-Tree) мне не подходили из-за большого веса (около 50 г с подводкой и датчиками), цены (более $100), а так же слишком большой минимально-измеряемой скорости потока (20 км/ч).
Далее последовала попытка сконструировать трубку Пито самостоятельно, используя набор пластиковых трубок и два микроскопических датчика атмосферного давления BMP085, включенных по дифференциальной схеме. Увы, и здесь я ошибся. Хотя статическая чувствительность этих барометров действительно очень высока (ок. 10 см абсолютной высоты) эксперименты и простейшие расчеты показали, что трубка Пито на их основе будет даже хуже, чем трубка Пито от EagleTree, и точности измерений не хватит для мониторинга скоростей ниже 20 км/час.
А чем еще можно мерить скорость воздушного потока? Всем известен "чашечный" анемометр, традиционно используемый для измерения скорости ветра. Идя по аналогии, можно предположить, что аэродинамическую скорость можно мерить не такой большой вертушкой, а маленьким пропеллером, установленным на крыле модели. При полете, частота вращения пропеллера должна быть более-менее пропорциональна скорости набегающего потока. А как считать частоту оборотов? Можно поставить пропеллер на ось микро-электромотора и мерить генерируемое напряжение, но есть еще более простой способ - использовать оптопару (датчик на основе светодиода и фотодиода) и соосную крыльчатку для прерывания света (в оптопаре светодиод формирует засветку, а фотодиод генерирует электрические импульсы).
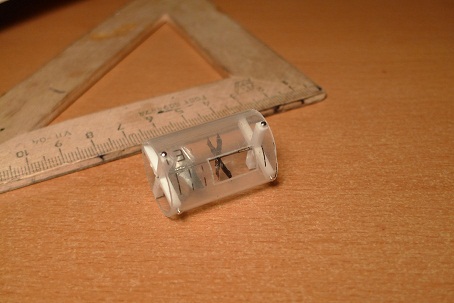
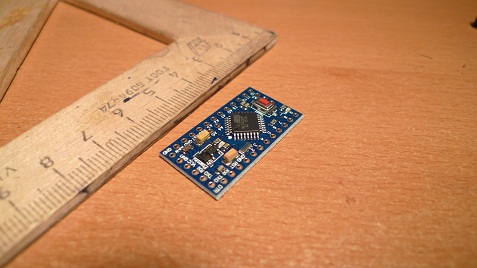
Нельзя ли попытаться сделать такой маленький легкий пропеллерный измеритель скорости? Оказалось, что действительно можно. После нескольких попыток, из 20 мл шприца и фольги от таблеток удалось изготовить пропеллерный анемометр диаметром около 15 мм и весящий около 3 г. В качестве оптопары был использован достаточно популярный концевой оптический датчик HOA1874, а в качестве контроллера и счетчика сигналов - плата Arduino Micro, весящая 8 г и, являющиеся уменьшенным клоном достаточно мощной Arduino Leonardo.
Программирование Ардуино.
Эта часть для меня оказалась относительно несложной - Ардуино легко программируется, я работаю программистом и Интернет полон примеров примеров решения похожих задач. Для чтения сигналов с оптопары, импульсного сигнала управления с приемника и формирования импульсов управления стабилизатора использовались, как внешние прерывания Ардуино, так и ее внутренние таймеры. Для стабилизации полета Ардуино вычисляло несколько несложных несложных формул, преобразуя входные сигналы в выходные (здесь по поводу программирования можно сказать много, но я не буду приводить здесь деталей, т.к. это тема для отдельной статьи).
С установкой контроллера усиления гироскопа-стабилизатора на борту появился дополнительный настраиваемый относительно мощный компьютер, который позволил сделать еще много полезных приятных вещей - например, сообщать писком о разрядке бортового аккумулятора. Так же очень важно было и то, что параметры внутренних уравнений контроллера можно было устанавливать прямо на поле, с помощью специальных движений рукояток пульта управления (так же программируются параметры регуляторов скорости бесколлекторных моторов).
Испытание датчика скорости.
Датчик скорости оправдал ожидания. Я откалибровал его для потоков 10 - 60 км в час (высовывая из окна машины) и нашел, что он ведет себя более-менее линейно. Далее эти параметры были введены в контроллер модели и произведены полевые испытания. При появлении "умного" коэффициента усиления стабилизатора нежелательное возбуждение исчезло - стабилизация стала более-менее оптимальной во всех режимах полета. На малых скоростях полета стабилизация была максимальной, на высоких - практически выключалась, так как даже маленькая модель здесь обладает высокой собственной устойчивостью. Ну и управление моделью стало гораздо более удобным - отсутствие дополнительных движений, связанных с подстройками режима гироскопа позволяло пилоту полностью сконцентрироваться на пилотаже.
Стабилизация аэродинамической скорости.
Как еще можно улучшить устойчивость полета? Модели, летящей с низкой скоростью, близкой к скорости сваливания, очень мешают продольные "хвостовые" порывы ветра. Попав в такой порыв модель "проваливается" вниз и падает до тех пор, пока пилот изменением тяги не увеличит ее аэродинамическую скорость. А не стабилизировать ли аэродинамическую скорости в режиме горизонтального полета?
Для выяснения этого вопроса я быстро провел необходимый эксперимент - тут больших переделок не потребовалось, ,все оборудование уже было установлено, только оставалось пропустить управляющий сигнал канала тяги двигателя через Ардуино и запрограммировать аппаратную стабилизацию тяги по скорости.
Испытания стабилизатора скорости.
Первые же эксперименты показали правильность данного подхода - модель стала летать на минимальной скорости даже при умеренном порывистом ветре 10 - 15 км/ч. При этом в горизонтальном полете (2D стабилизация) управление тягой было несколько непривычно для оператора, но модель вела себя вполне предсказуема и, после некоторой тренировки, управлялась гораздо уверенней. Стал возможен устойчивый полет на высоте 0.5 - 2 метра, продольные порывы ветра купировались на 80-90%.
Нужна ли стабилизация скорости при выполнении фигур пилотажа? Я делал и такие эксперименты, но решил от здесь отказаться от стабилизации - в 3D режиме тяга должна находиться в полном соответствии с указаниями оператора.
Выводы.
В целом, установка стабилизатора полета позволила перевести "игрушечное" крыло Mini Sonic в раздел вполне интересно летающих моделей. За счет стабилизации улучшились практически все важные летные параметры - уменьшилась аэродинамическая скорость сваливания, увеличилась стабильность управления и устойчивость к продольным порывам ветра. Теперь, для спокойных горизонтальных полетов мне достаточно 50 метровой поляны в городском парке. Я не сильно боюсь падений и случайных столкновений с людьми или деревьями - при скорости 20-30 км в час обычно никаких серьезных повреждений не происходит. От возможных фатальных застреваний в кронах деревьев меня спасает устойчивый "сверхнизкий" полет.
Маленькая модель удобно перевозится в общественном транспорте, и выезжая за город, я легко отпускаю модель горизонтально на расстояние 150 - 200 метров, а также занимаюсь 3D пилотажем. Здесь можно сказать, что при наличии большого пилотажного пространства, даже при сильном ветре порывистом ветре стабилизированное крыло летает лучше, чем среднеформатные нестабилизированные модели.
Относительно сложная ""комплексная стабилизация" - 7D (6D гироскоп + датчик скорости) увеличила устойчивость к продольным порывам ветра, так же заметно улучшив летные характеристики. Но для этой части переделки желательно иметь опыт радио-монтажа и программирования. Поэтому, я рекомендую сначала установить стабилизатор полета и научиться летать с ним, а потом переходить к более сложной части модернизации.
Что можно сказать о недостатках? Единственным заметным отличием стабилизированного парколета является повышенная сложность бортовой аппаратуры и, как следствие, необходимость его настройки и обслуживания - ежедневной предстартовой подготовки (проверки работоспособности датчика скорости и стабилизатора) и периодической калибровки гироскопа.