Данная публикация является продолжением статьи Стабилизация крыла HK Mini-Sonic . В этой части рассматриваются особенности применения гироскопа-стабилизатора Guardian Eagle Tree.
Почему именно Guardian?
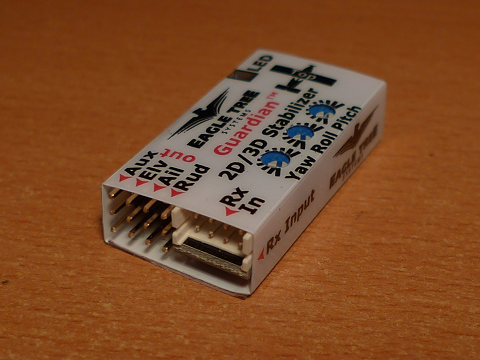
- Легкий - вес без кабеля 7 г. , кабель весит отдельные 4.5 г.
- Полноценная 6-ти осная стабилизация - 3 гироскопа и 3 акселерометра, возможность осуществления стабилизации как пилотажа (3D), так и горизонтального полета (2D).
- Наличие входов управления коэффициентом стабилизации - "Gain" и 3-х позиционного входа переключателя режимов стабилизации - "Mod".
- Очень большие возможности конфигурации - разные типы самолетов, режимов, параметров наличие большого количества полезных добавок к режимам.
- Настройка параметров стабилизатора с помощью Windows программы через микро-USB разъем.
- Возможность калибровки гироскопов в полевых условиях.
- Быстрота работы стабилизатора (по наблюдениям, отрабатывает возмущения гораздо быстрее, чем стабилизаторы от Orange).
- Надежность электроники и работы программного обеспечения - пока я не нашел заметных ошибок при управлении.
Отличие 2D и 3D режимов.
Режим горизонтального полета (2D) отличается от "пилотажного режима" (3D) главным образом тем, что использует акселерометры для определения плоскости горизонта, он гораздо сложнее с точки зрения вычислений и требует предстартовой калибровки. Дешевые стабилизаторы, как правило, не поддерживают этого режима.
В 2D режиме, сигнал управления с пульта воспринимается как сигнал отклонения от горизонтального полета, и модель при управлении становиться по ощущениям несколько неповоротливой, как верхнеплан-тренер. Сначала это вызывает некоторое неприятие, но потом оператор быстро учится и понимает, как это свойство использовать - с такой стабилизацией можно улетать гораздо дальше зоны хорошей видимости - не надо следить за ориентацией модели, теперь курс поддерживается автоматически.
Как работает 2D стабилизация?
Многие думают, что контроллер запоминает плоскость горизонта в момент калибровки и потом, используя гироскопы и математические операции, восстанавливает ее положение. Это не совсем так. Дело в том, что используемые в контроллере гироскопы не такие точные, как те, которые используются в баллистических ракетах, у них относительно большой "дрейф". Поэтому, через очень непродолжительное время положение вертикали, запомненное при старте, будет уже неверным. Как восстановить истинное значение? Используется сила земного тяготения. Измеряя ее направление акселерометрами, можно понять как расположен горизонт. Но ведь модель двигается с ускорением и не является инерциальной системой отсчета, и измерения ускорения могут оказаться не верными!? Да, и это правда, но все равно, собственные ускорения модели малы по сравнению с ускорением свободного падения (9.8 м/cек), их можно "усреднить" и минимизировать их влияния. Вспомните, при полете полете пассажиром в самолете, ведь можно определить где верх и где низ не выглядывая в окно :)
Зачем нужен сигнал Gain?
Сигнал Gain управляет коэффициентом обратной связи при стабилизации. Чем выше усилиение в цепи обратной связи, тем сильнее и лучше стабилизация, за исключением того, что при сильном увеличении этого параметра система "самовозбуждается" - модель начнает неприятно вибрировать. Поэтому, для устойчивого полета необходимо подобрать оптимальный коэффициент стабилизации, который, к сожалению, сильно зависит от скорости модели. Для малых скоростей этот коэффициент должен быть большой - воздушный поток слаб и нужно сильно отклонять рули, чтобы достичь желаемого воздействия. На большой скорости даже малое отклонение элеронов сильно влияет на полет модели - здесь коэффициент стабилизации должен стремиться к нулю. Поэтому, коэффициент обратной связи должен меняться в зависимости от условий полета и обычно формируется потенциометром, расположенным рядом с рукоятками управления. Пилот должен научиться во время полета устанавливать оптимальный коэффициент стабилизации.
На дешевых стабилизаторах сигнал Gain обычно заменяют сигналом включения-выключения стабилизатора и, включают стабилизатор только тогда, когда скорость полета мала, например, при крейсерском горизонтальном полете или при посадке.
Возможные применения.
- Guardian очень хорошо работает с маленькими и средними моделями и поэтому идеально подходит для парколетов и тренеров - он позволяет выполнять полеты на предельно-малых скоростях, полеты в условиях ограниченной видимости, а так же хорошо борется с порывами ветра и сильно уменьшает количество аварий при обучении процедуре посадки.
- Он так же показал очень хорошие результаты при стабилизации FPV моделей. Я экспериментировал с мото-планером Easy Star, на который был установлен Guardian. Использование дешевого mini Osd и 600 мВт 5.8 ГГц передатчика позволило сделать относительно простой FPV-тренер для полетов в радиусе 1-2 км. Хотя стабилизатор и не давал всей гаммы возможностей полноценного автопилота, но значительно облегчал управление моделью, существенно увеличивая стабильность курса полета и, особенно, выручал в ситуациях, когда видео-картинка пропадала на несколько секунд из-за плохих условий связи.
- Высший пилотаж - я не пробовал устанавливать Guardian на пилотажках, но в интернет выложено большое количество видео о том, как с помощью Guardian улучшить выполнение фигур пилотажа. И хотя серьезные пилоты стабилизаторами не пользуются, но и здесь стабилизация может сыграть положительную роль, хотя бы при обучении.
- Так же существуют видео, посвящённые применению Guardian для стабилизации "копийных", а так же больших, тяжелых (около 25 кг) и турбореактивных моделей. Понятно, что обидно потерять дорогую модель из-за порыва ветра, а "стабилизацированная" посадка гораздо безопаснее для модели.
Установка стабилизатора.
В отличии от многих других стабилизаторов, Guardian не требует специальной виброизоляции. Можно конечно наклеить его на полоску пористой резины, но из-за низкого веса стабилизатора изоляционный эффект будет минимален. Я обычно приклеивал его ко дну кабины липучкой и никогда не замечал, что наведенная мотором вибрация оказывает заметное влияние на устойчивость полета.
Требования к оборудованию.
Сервомоторы, подключенные к Guardian должны быть быстрыми и износостойкими. Понятно, что их быстродействие сильно влияют на качество стабилизации модели, а износостойкость необходимо в силу того факта, что при включеном режиме стабилизации они всегда будут находиться в движении - слегка "вибрировать". Это нормально, функция стабилизации требует такого поведения.
Пара передатчик-приемник должны поддерживать 4-6 каналов пропорционального управления. На панеле передатчика крайне желательно иметь удобно расположенный потенциометр для формирования сигнал Gain, а так же 3-х позиционный переключатель, формирующий сигнал Mod для селекции режима стабилизатора. Так же важно, чтобы приемник модели обладал функцией failsafe (предустановленно действие приемника в случае исчезновения сигнала передатчика).
Зачем нужен файлсейф?
Если модель использует стабилизатор, и особенно имеющий 2D режим, то настройка failsafe, это одна из самых важных частей подготовки модели к полетам, которую нельзя недооценивать. Очень много дешевых приемников при потере сигнала выполняют простейший failsafe протокол - сохраняют выходные управляющие сигналы такими, какими они были в момент разрыва связи. Если в этот момент модель выполняла 2D-стабилизированный горизонтальный полет - она полетит очень далеко и скорее всего, вы ее больше не увидите. Очень много моделей с установленным стабилизаторами были потеряны именно из-за этой особенности.
Я тоже, один раз, чуть не потерял модель - у приемника Turnigy было незаметное повреждение кабеля антенны, которое неожиданно "сработало" в воздухе, когда стабилизатор был в 2D режиме - после этого модель перестала слушаться передатчика и спокойно полетела равномерно и горизонтально в страну-изготовитель приемника :). Я быстро потерял модель из виду и пол-километра бежал по парку, руководствуясь только интуицией. Спасли меня два обстоятельства - мой приемник держал failsafe только в течении 15 сек., а после просто выключался (как оказалось, это зависит от модификации прошивки) и то, что в воскресенье в парке было относительно много свидетелей этого автономного полета. Что сказать - повезло ...
Правильный файлсейф для моделей со стабилизатором должен полностью выключать тягу двигателя при потере радио-сигнала управления. Тогда, в любом случае - есть стабилизация или нет, модель перейдет в режим планирования и приземлится где-нибудь поблизости.
Подключение.
На стабилизатор подаются 4 сигнала управления моделью (Elv - элеваторы, Ail- элероны, Rd - руль, Aux - второй флапперон(опциональный)), а так же сигнал Gain - коэффициент стабилизации и Mod - сигнал переключения режимов стабилизации. Выдает стабилизатор только сигналы управления моделью - (Elv, Ail, Rd, Aux).
Guardian поддерживает практически все известные типы моделей (классика, крыло, V-tail) - тип задается в конфигурации самого стабилизатора и, после этого, выходные сигналы микшируются в зависимости от выбранного типа. Входные сигналы не нужно микшировать - передатчик всегда должен быть настроен на управление моделью в классической конфигурации.
Управление моделью через стабилизатор требует 5-6 каналов приемника, что может оказаться проблемой. Как упростить схему управления? - на стабилизатор можно не подавать сигналы Mod и Gain, предустановив их значение в конфигурации стабилизатора. Отказываться от сигнала управления Mod я не рекомендую, с его отключением сразу пропадает возможность смены режимов полета и калибровки стабилизатора в полевых условиях. Сигнал Gain действительно может быть отключен, например, для FPV носителей, - такие модели обычно летают на более-менее стабильной крейсерской скорости, для которой и нужно предустановить оптимальный параметер. В этом случае, необходимые коэффициенты обратной связи устанавливается непосредственно потенциометрами, расположенными на корпусе стабилизатора.
Канал Mod обычно подключают к 3-х позиционному переключателю. Параметрами конфигурации стабилизатора можно ассоциировать каждое положение переключателя с одним из режимов стабилизации. Для пилотажной модели я обычно выбираю следующую тройку:
- '2D + Heading Hold'
- 'Stabilization Disabled'
- '3D' для опытных или '3D + Heading Hold' для начинающих пилотов.
Для FPV носителя можно даже ограничиться 2-х позиционником на пульте и выбрать следующие режимы:
- '2D + Heading Hold'
- 'Stabilization Disabled'
Еще одна интересная особенность электрического подключения стабилизатора. Для его питания можно применять отдельный источник напряжения, изолировав стобилизатор от цепи питания сервомоторов, которая очень часто является источником импульсных помех. В документации стабилизатора подробно объяснено, как это сделать.
Настройка.
Настройка стабилизатора может производится, как с персонального компьютера, через микро-USB разъем, так и непосредственно, с помощью рукояток пульта, через меню выбора состояний (так обычно настраивают регуляторы электромоторов). Первый способ относительно удобный - Windows программа осуществляющая настройку, имеет понятный и интуитивный интерфейс. Вторым "полевым" способом я никогда не пользовался, т.к. меню выбора состояний достаточно сложное, а текущее состояния стабилизатор сообщается разным количеством подрагиваний элеронов.
Стабилизатор имеет три встроенных потенциометра для непосредственной настройки коэффициента стабилизации по курсу (рысканью), крену, и тангажу. При использовании входного сигнала коэффициента стабилизации Gain коэффициенты, установленные потенциометрами, умножаются на коэффициент, устанавливаемый рукояткой на пульте.
Полезные добавки к режимам.
Guardian имеет большое количество параметров режимов стабилизации. Я так и не разобрался во всех тонкостях, но некоторые "добавки" достаточно полезны.
- 'Heading Hold Gain' - параметр определяющий насколько сильно стабилизатор будет пытаться удержать текущий курс модели. Понятно что для FPV моделей этот параметр должен быть большим для пилотажные моделей - маленьким.
- 'Сenter Stick Stabilization Only Mode' - добавка 2D режима - определяет "квадрат" положений рукоятки управления элероны-элеваторы, внутри которого стабилизация включена. При выходе рукоятки за пределы этого квадрата стабилизация отключается и сигнал управления подается прямо на элероны. Такая добавка очень полезна, когда нужно выполнить быстрое движение, например, сделать бочку при горизонтальном полете или резко уйти в сторону от препятствия.
Калибровка.
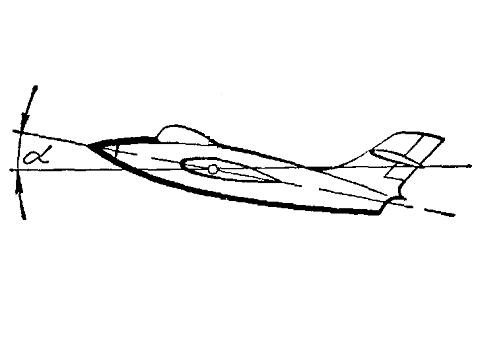
Периодическая калибровка нужна для нормального функционирования стабилизатора в режиме горизонтального полета (2D). Именно эта операция измеряет направление и величину вектора тяжести акселерометрами гироскопа и фиксирует положение вертикали относительно летящей модели. Как производить калибровку? Надо, сразу после включения питания, расположить модель так, как она обычно летит в воздухе - с небольшим отклонением носа вверх на угол атаки. После этого переключить вверх-вниз-вверх переключатель режимов стабилизации на пульте. Все это надо успеть сделать в первые 15 сек. после подачи питания на стабилизатор. Процесс калибровки продолжается около 5 сек. и подтверждается небольшим движением элеронов модели.
Можно так же производить калибровку непосредственно в воздухе. Для этого, в режиме горизонтального полета, нужно четыре раза переключить вверх-вниз-вверх переключатель режимов. Тогда модель запомнит текущее положение элеронов и будет считать его "правильным" для этого режима. Операция требует некоторой сноровки, так как во время калибровки пилот должен еще поддерживать стабильный полет модели (не знаю почему, но я такой калибровкой редко пользуюсь,).
Обычно значение параметров калибровки сохраняется достаточно долгое время, поэтому если нет веских причин (изменение ЦГ модели, резкая смена температуры, удар в случае жесткой посадки и т.д.), калибровку можно производить даже реже одного раза в неделю.
Найденные недостатки:
- Относительно высокая цена ($60 - $75 c доставкой).
- Достаточно объемное руководство пользователя на английском языке в виде PDF файла, что затрудняет перевод и навигацию.
- Путанное меню программирования параметров с пульта, отсутствие пищалки - текущее состояние выводится миганием достаточно тусклого светодиода.
- Закрытый формат и невозможность интеграции с другими устройствами.
- Относительно тяжелый кабель (4.5 г) входных сигналов с нестандартным разъемом.
Выводы:
По моему мнению, Guardian Eagle Tree 2D/3D на сегодняшний день является лучшим гироскопом-стабилизатором для моделей среднего уровня стоимости ($100 - $1000) и сложности. Цена стабилизатора вполне оправдана его легкостью, универсальностью и надежностью, а практическое отсутсвие аналогов на рынке, во многих случаях делает это устройство единственным возможным техническим решением для стабилизации полета модели.
Дополнение: Читатели поправили - на рынке есть близкий аналог - стабилизатор FY-40A, который стоит слегка дешевле Guardian (около $50), но несколько тяжелее ( 17 г.) и проще - может конфигурироваться только переключателями и потенциометрами на корпусе. Так же имеет 2D и 3D режимы и Gain вход. По отзывам и рекомендациям, так же достаточно надежен и удобен в применении.