| Улучшенный смеситель каналов для пилотажного крыла |
| Технологии моделизма - Компьтерные Технологии |
| Автор: Андрей |
|
Улучшенный смеситель каналов для пилотажного крыла
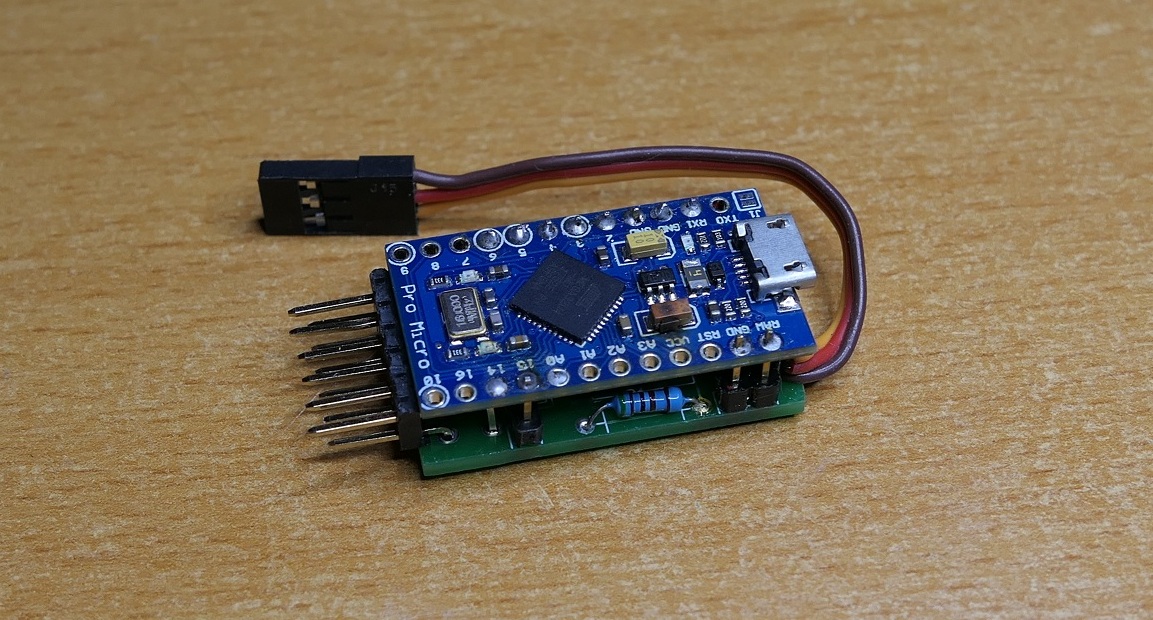
Я сейчас увлекаюсь разработкой 2-х моторных пилотажных моделей. Такие модели имеют нестандартную схему управления - из-за наличия 2-х двигателей они несколько похожи на квадрокоптеры и нуждаются в гироскопах-стабилизаторах. Но 2-х моторную модель нельзя подключить напрямую к стабилизатору полета и для таких моделей я изготавливаю отдельный смеситель сигналов на Arduino Pro Micro, про который уже написал несколько статей. Последняя версия смесителя использует стабилизирующий приемника FrSky-S8R, смесители этого типа отлетали в сумме несколько десятков часов на различных моделях и хорошо себя показали. Но вместе с этим у смесителя были обнаружены некоторые недостатки:
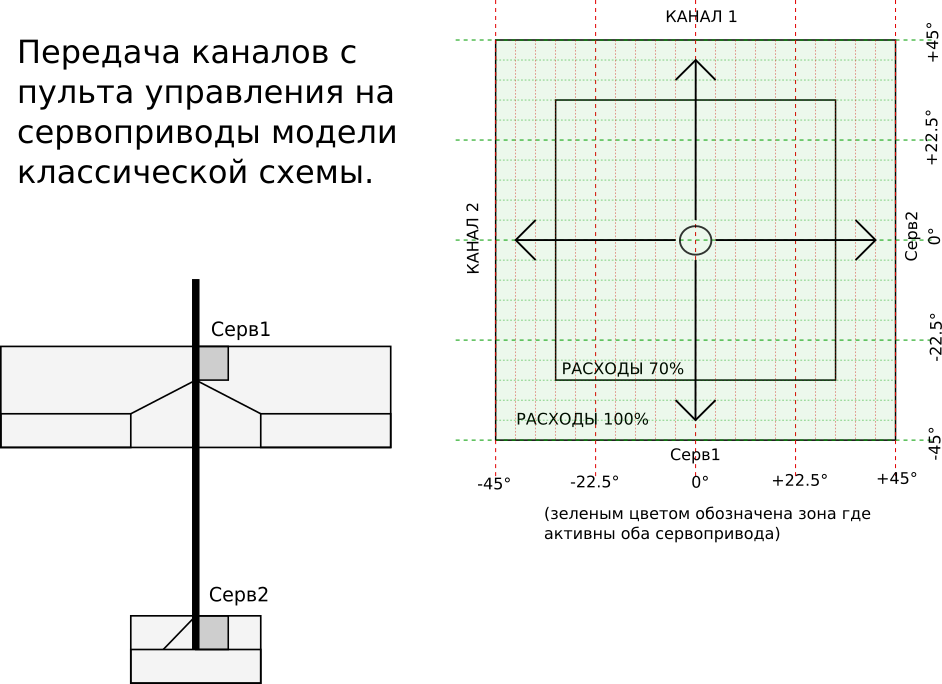
- Для настройки смесителя нужна относительно сложная процедура калибровки. Это свойство он унаследовал от еще от более старой версии с PWM сигналами. Но входной сигнала SBUS сигнал практически напрямую в цифровом виде приходит с процессора пульта управления — зачем его калибровать, если все параметры стабильны и их можно подобрать заранее? - Невысокая точность. Фронты выходного PWM сигнал формируются программно и точность сигналов составляет около 1-2 % от его длительности, хотя Arduino Pro Micro может выдавать прецизионные цифровые сигналы ШИМ непосредственно с встроенных таймеров. - Не оптимальное замешивавшие сигналов элевонов крыла. Анализ был сделан для нахождения оптимального смешивания сигналов для 2-х двигателей. Дополнительный смеситель сигналов элевонов не был изначально проанализирован тщательно и для него так же можно найти оптимальные параметры. Улучшения смесителя Отказ от калибровки - здесь просто необходимо найти параметры пульта и коэффициенты для смешивания каналов. Оказалось, что для правильной работы для каналов управления FrSky S8R просто необходимо уменьшить диапазон входного сигнала до 65 % (1170 us - 1820 us) от номинального. Это необходимо, потому что FrSky S8R приемник со стабилизатором полета и может добавлять к сигналу идущего с передатчика сигнал «коррекции», поступающий с гироскопов. И этот стабилизационный сигнал можно включать/выключить в любой момент тумблером на пульте. Замешивавшие сигнала элевонов - смешение сигналов для элевонов не есть просто сумма и разница сигналов канала элеронов (Ail) и канала элеватора (Elv). Необходимо учесть так же ограничения накладываемые сервоприводами, которые обычно работают в диапазоне (900 - 2000us) и обеспечивают отклонение элевонов - 45о + 45о. Выход длительности сигнала за границы временного диапазона приводит к заклиниванию сервопривода в крайнем положении и потенциально может привести к его поломке. Поэтому операция смешивания сигналов так должна учитывать эти ограничения. Проиллюстрируем смешение на графиках - для "классической" схемы модели каналы Ail и Elv независимы друг от друга и весь диапазон управления передается на сервоприводы без потерь:
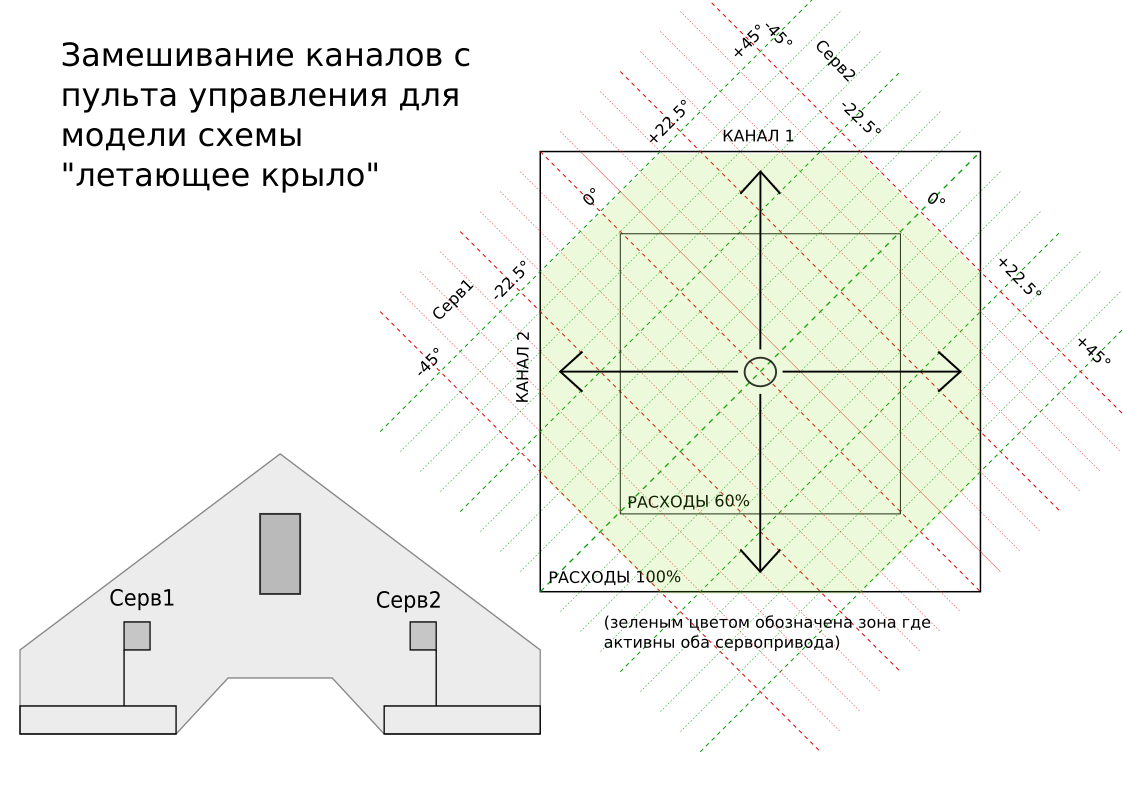
Для модели "летающее крыло" все не так просто - если мы делаем смешение по классической «аддитивной» схеме, то преобразование Ail + Elv и Ail-Elv разворачивает оси координат диапазона управления на 45о, и такой повернутый квадрат уже целиком не помещается в квадрат диапазона сигналов сервоприводов.
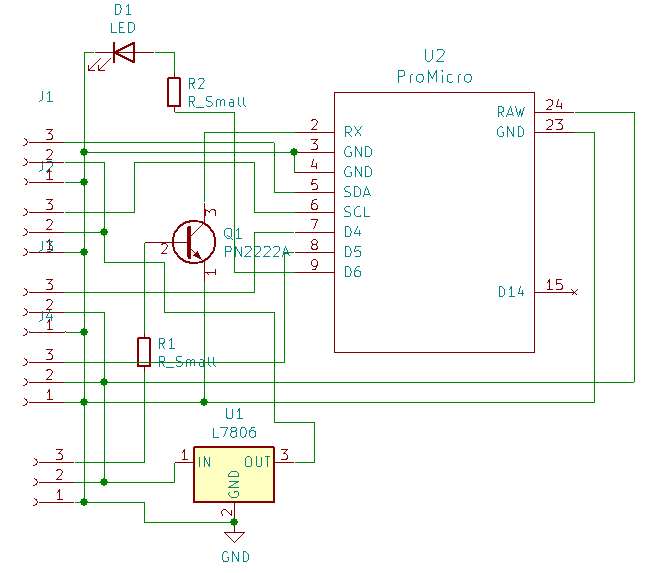
В этой ситуации необходимо чем то жертвовать: Схема смесителя
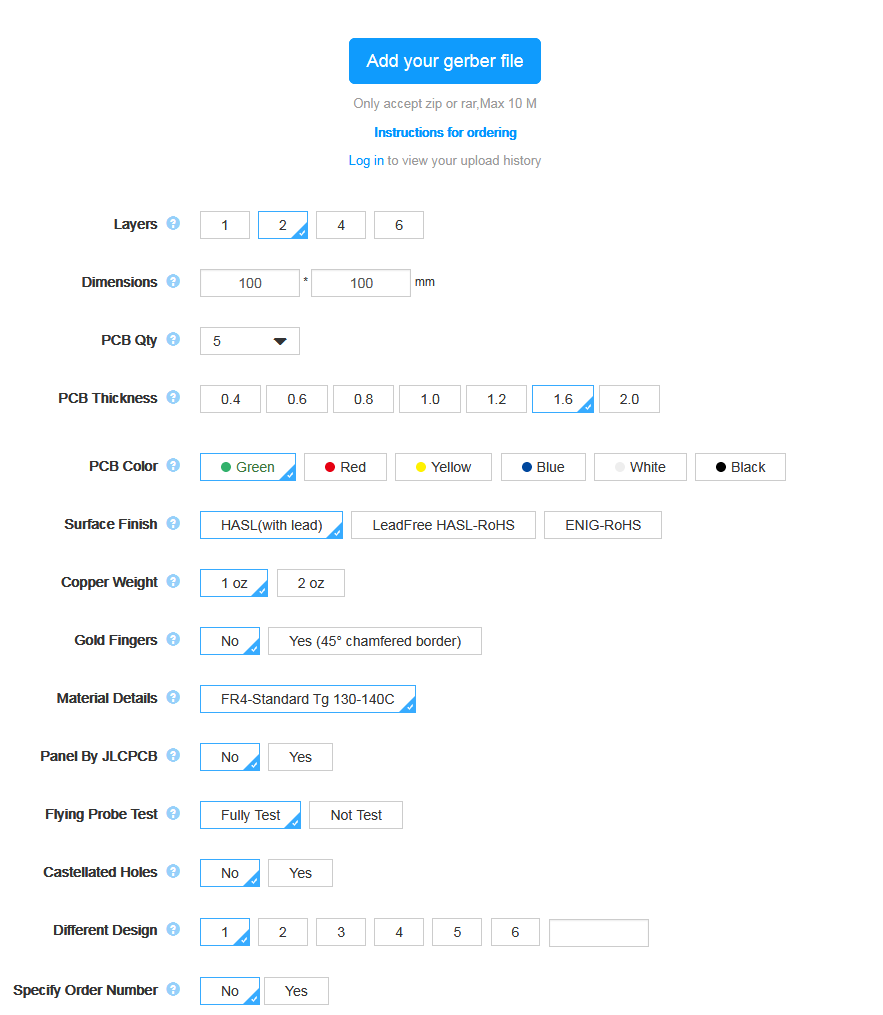
Изготовление печатной платы в Китае Еще один интересный момент состоит в том, что я изготовил для смесителя печатную плату! Оказывается, что заказать изготовление печатной платы очень дешево и просто - в Китае есть много фабрик делающих небольшие партии печатных плат для любителей электроники. Мне нужно было только нарисовать схему в -е, преобразовать ее в макет печатной платы, сгенерировать файлы для фотоплоттера и сверлильного станка, запаковать в архив и отослать на фабрику. Так как я сохранил , то эти действия может повторить каждый и потратив полчаса для оформления заказа, через 2-3 недели получить комплект из 5 печатных плат за относительно небольшие деньги (цена меняется, так как действуют разные скидки и обычно составляет 400 - 600 рублей) .
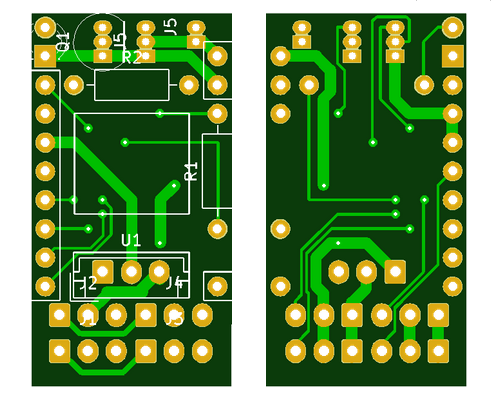
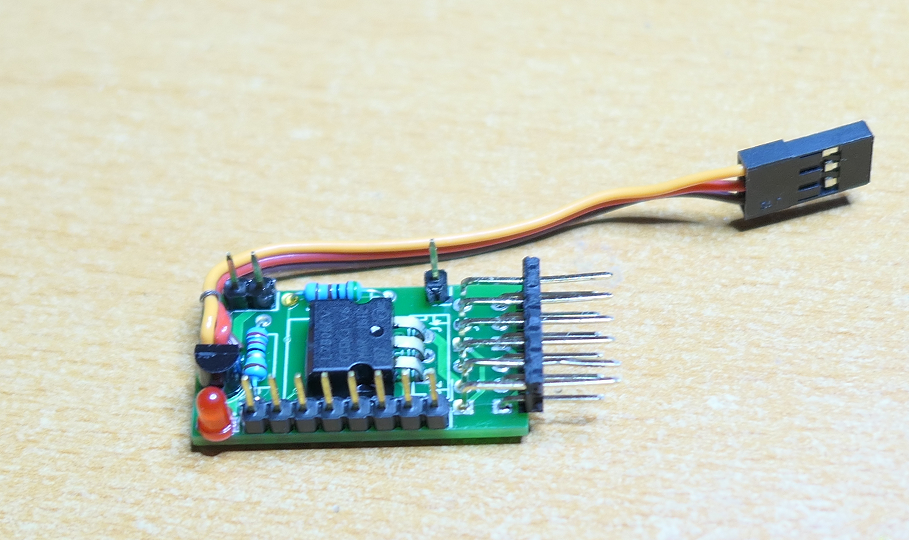
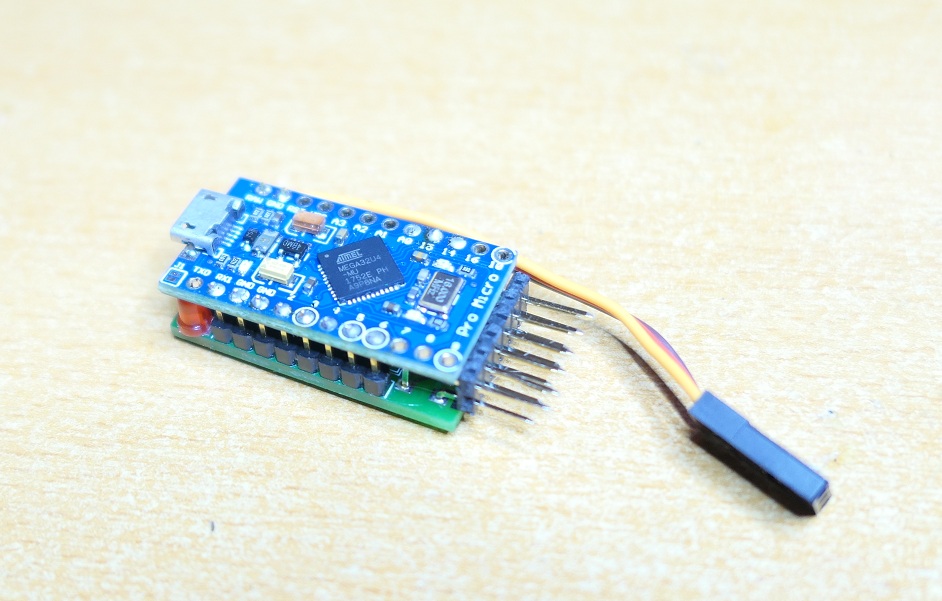
- после чего нажать кнопку завершения подготовления заказа - Save to Cart. Распайка компонентов смесителя Монтаж платы достаточно интуитивен - сначала на плату устанавливаются все детали, потом сверху припаивается плата Arduino Micro Pro. Расположение всех компонентов обозначено шелкографией единственное, что может вызвать непонимание - это "хомутик" из провочлочки для крепления провода канала SBus, обозначенный как разъем J5. Все детали более-менее стандартные, "угловой" разъем для подключения моторов и сервоприводов с поворотом штырьков на 90 градусов можно заказать .
Программирование смесителя и настройка приемника и передатчика Программирование смесителя не сильно отличается от программирования предыдущей версии, необходимо: - Установить на компьютере программную среду Ардуино. Как теперь правильно настроить передатчик и приемник FrSky-S8R для работы со смесителем? При включении питания и наличии активного сигнала SBus с приемника смеситель должен три раза мигнуть светодиодом - это означает смеситель вошел в рабочий режим. Выводы. Этот вариант смесителя так же отлетал более десяти часов и продемонтстрировавал надежную работу. Единственный выявленный недостаток смесителя - к нему нельзя подключать прецизинонные сервоприводы (типа ES3351) - точности смесителя (около 1%) не хватает - прецизионные сервоприводы немного "дрожат" и, к сожалению, быстро изнашиваются. Сервоприводы "обычной точности" работают без замечаний - я в своих моделях использую дешевые и надежные HХT-900 (или их клоны). Всем удачных полетов! |