Для управления Арлекином используются 6 каналов: 1 - канал тяги, 2 - канал элеронов, 3 - канал элеваторов, 4 - канал руля направления, 5 - канал - регулятор коэффициента усиления (Gain) гироскопа-стабилизатора,6 - канал - переключатель режимов гироскопа-стабилизатора (В случае использования стабилизатора Orange, канал 5 используется для включения-выключения стабилизации).
Установка расходов и экспонент.
В обычном режиме "динамического пилотажа" у меня стоят расходы: тяга - 100%, руль направления - 80%, элеваторы - 80%, элероны - 70%. 35% экспоненты выставлены по элеронам, элеваторам и рулю направления. Можно использовать еще один переключатель и сформировать двойные расходы - сделать дополнительный режим "медленного пилотажа" для выполнения вертикальных зависаний, ножей и других медленных фигур - расходы всех каналов управления устанавливаются в 50%. (Элероны - 40%) . Так же, в случае использования двойных расходов можно установить разный диапазон для канала Gain. Здесь пропорция обратная - в режиме "Динамического пилотажа" Gain должен изменятся от в диапазоне 0 - 60%. В режиме "медленного пилотажа" - в диапазоне 0 - 100%.
Настройка гироскопа-стабилизатора Guardian.
Для того чтобы настроить Guardian необходимо использовать программу Data Recorder под Windows, которую скачивают со . После подключения Guardian к микро-USB разъему и старта программы появится меню настройки. Необходимо выполнить следующие изменения:
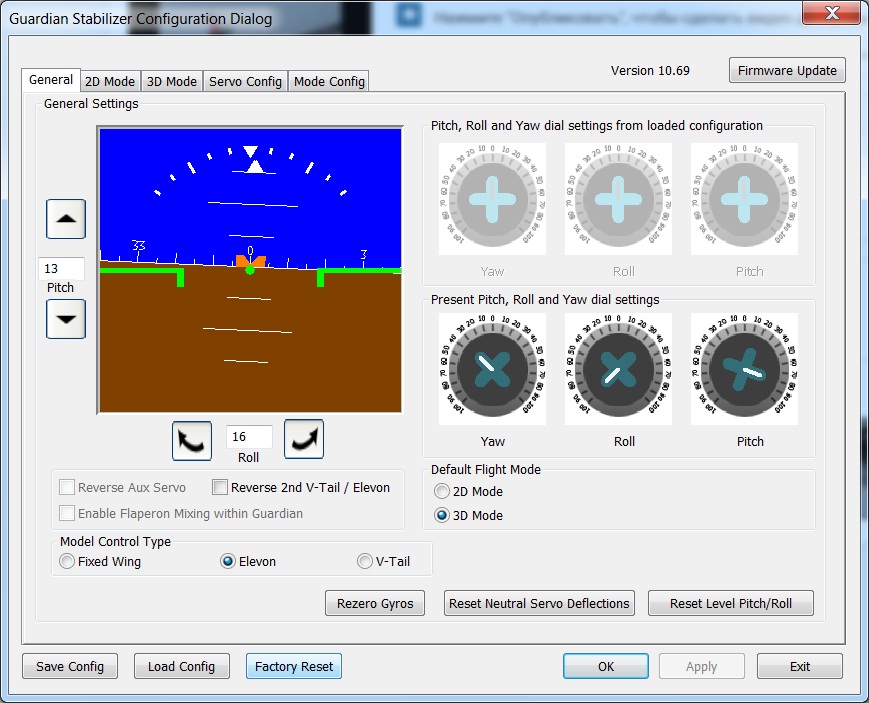
- На вкладке General Settings установить замешивание каналов для управления крылом происходит непосредственно в стабилизаторе Guardian, где выбирается схема модели летающее крыло (Elvon).
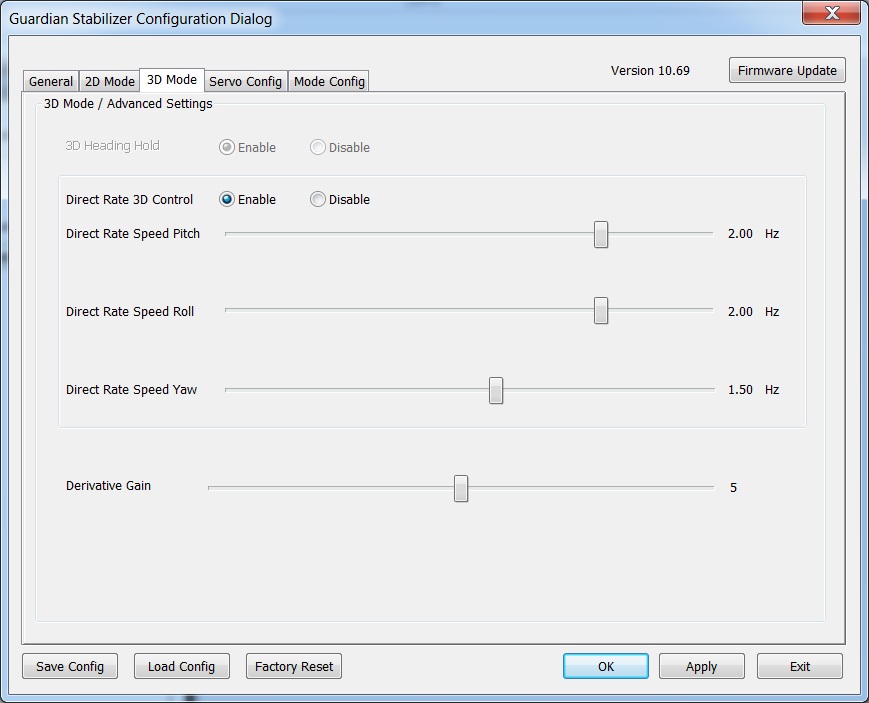
- На вкладке 3D Mode / Advanced Settings я рекомендую увеличить скорость вращения по по крену и тангажу до 2-х оборотов в секунду.
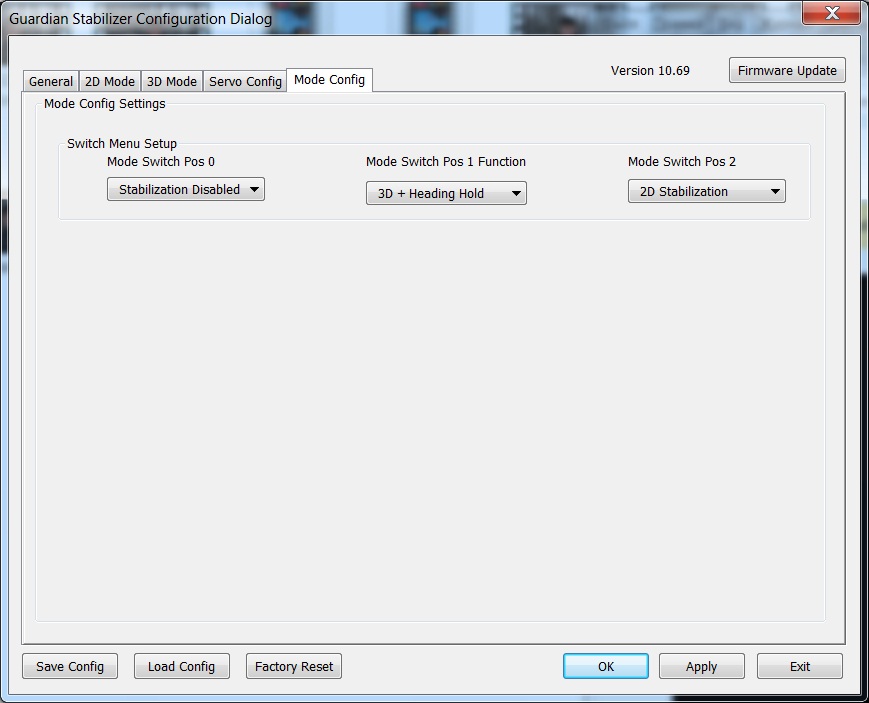
- На вкладке Mode Config Settings устанавливается переключение режимов пилотажа. У меня на режимах стоит 3-х позиционный переключатель и режимы выбраны как Stablization Disabled, 3-D + Heading Hold, 2-D Stabilization.
- С помощью встроенных потенциометров Guardian позволяет независимо установить кофициенты усиления по крену, тангажу и рысканью. На моем стабилизаторе сейчас стоят соответственно 90%, 80% и 40%, но эти коэффициенты подбираются для каждой модели экспериментально. К сожалению, потенциометры так же устанавливают знак коэффициента обратной связи, усиление меняется в диапазоне от -100% до +100 % - центральное положение регулятора соответствует 0% усиления. Это неудобно - сам потенциометр очень маленький и установить нужный коэффициент бывает непросто.
Настройка гироскопа-стабилизатора Orange.
Cтабилизатор Orange устроен проще - у него нет 2D режима. Он настраивается только потенциометрами и микро-переключателям. При подключении гироскопа достаточно только сделать базовые действия настройки.
- необходимо включить переключатели Delta и влючить AUX Сontrol.
- Потенциометры коэффициентов обратной связи выставить в центральное положения, которое соответствуют 50% усиления.
Калибровка регуляторов двигателей и смесителя сигналов.
Чтобы полеты проходили нормально, необходимо добиться одинаковой тяги обоих двигателей. Это достигается комплексными мерами.
- Сначала надо проверить пропеллеры - на них не должно быть сколов и вмятин. Лопасти не должны быть изогнуты. Небольшие дефекты можно починить обрезанием резаком и разгибанием лопастей. Если дефект значителен - лучше заменить винт (Поэтому покупать винты над с запасом).
- Далее, надо откалибровать смеситель-формирователь сигналов тяги. Подробноб эта операция описана здесь .
- Далее, надо откалибровать контроллеры-регуляторы бесколекторных двигателей. Они калибруются вместе, командами подающимися через изменение тяги, по описанном в их инструкции алгоритму.
- Проверить визуально начало вращения двигателей и динамику тяги при увеличении. Если равенство тяг нет - повторить весь цикл настроек снова.
C первой попытки получить желаемый результат непросто, мне приходилось потратить 2-3 итерации.
Проверка правильности замешивания сигналов на элеронах.
- Отключить гироскоп-стабилизатор. Перемещая рычажки пульта управления, проверить правильность подключения элеронов к каналам управления. Если элероны отклоняются в неправильную сторону, исправить положение можно включая инвертирование сигналов на пульте и взаимно меняя подключения элеронов к выходам стабилизатора Guardian.
- Проверка максимального отклонения элеронов. При максимальных сигналах на элероны (правая рукоятка находится у углах "квадрата") элероны должны отклонятся на 45-50 градусов.
Включить гироскоп и установить потенциометр пульта, формирующий сигнал Gain в максимум. Взять модель в руки - при покачивании модели в воздухе гироскоп стабилизатор должен воздействовать на элероны и двигатели модели так, чтобы они старалось вернуть модель в исходное положение. Если воздействие направлено в неправильную сторону - переменить полярность обратной связи (в Guardian это делается с помощью подстроечных потенциометров, в Orange - микропереключателями).
Проверка положения ЦГ
Центр тяжести модели должен находится примерно в плоскости пропеллеров. Точно подбирать положение ЦГ не нужно - гироскоп-стабилизатор эффективно компенсирует и эту ошибку.
Установка оптимальных коэффициентов стабилизатора Guardian.
Первые полеты проводить на небольшой тяге горизонтально с выключенным гироскопом.
В полете постепенно увеличивать Gain и смотреть, по какой оси (тангаж, крен, рысканье) первыми начнутся колебания модели - "самовозбуждения". Подстроечным резистором на стабилизаторе уменьшить коэффициент усиления для этой оси. Такую операцию нужно повторить много раз - до тех пор пока модель не начнет устойчиво летать на малых скоростях, при коэффициенте Gain выставленным в 100%.
При полетах на большой скорости модель все равно начнет "самовозбуждаться". Это нормально для всех моделей со стабилизатором полета - для этого и существует регулятор Gain на пульте - пилоту надо научится устанавливать оптимальный коэффициент усиления в зависимости от режима полета.
Установка оптимальных коэффициентов стабилизатора Orange.
У стабилизатора Orange, в отличие от Guardian, режим стабилизации устанавливается только подстроечными резисторами и микропереключателями. Входного канала Gain нет, но саму стабилизацию можно включать-выключать сигналом с пульта. Для Orange коэффициенты усиления необходимо подбирать не для минимальной, а для "нормальной", крейсерской скорости. Такое решение имеет свои недостатки - на низких скоростях стабилизация будет уже неоптимальной, но вполне достаточной, чтобы исправить ошибки динамики модели. А при полетах больших скоростях во избежании "самовозбуждения" стабилизацию можно отключать - модель на больших скоростях и так летает относительно устойчиво.
Использование и настройка 2D режима.
Стабилизатор Orange не имеет 2D режима стабилизации. Пи использовании Guardian 2D режим так же редко используется. Он может быть полезен только при кабрировании на максимально низкой скорости. Однако, 2D режим можно использовать также для "аварийного возвращения модели" - бывают случаи, когда ветер и турбулентность уносят модель так далеко, что у пилота уже практически нет возможности контролировать ее ориентацию. Обычно, в такой ситуации принимается решение об "аварийной посадке", которая достигается, прежде всего, выключением двигателей. Переход в 2D режим стабилизации полета дает дополнительный шанс вернуться - модель сама принимает горизонтальное положение и, появляется шанс ее вернуть.
Необходимо помнить, что для использования 2D режима Guardian должен быть "откалиброван" . Для калибровки модель нужно установить в горизонтальное положение и, сразу же после включения питания модели, включить-выключить стабилизацию 3-х позиционным переключателем режимов. Через несколько секунд стабилизатор покачиванием элеронов подтвердит окончание калибровки. Подробно о калибровке написано здесь.
Видео полетов
За последний месяц не было ни одного выходного без ветра, поэтому демонстрацию интересного медленного пилотажа пришлось отложить до лучших времен. Практически все полеты проводились при ветре 2 - 5 м/c и пилотаж во многом был борьбой со стихией. В видео я скомпилировал лучшие получившиеся моменты из нескольких дней съемки. Назвать это рекламным роликом Арлекина нельзя, но даже такой ролик поможет понять его летные возможности.
Кратко выводы
- Двух-моторные летающие крылья вполне могут быть пилотажными. Их динамика полетов отличается от пилотажек классической схемы, но вполне заслуживает внимания. Арлекин благодаря своей легкости пи ударо-защищенности, может быть хорошим пилотажным тренером.
- Не следует боятся разрабатывать нестандартную электронику для моделей на основе конструкторов Ардуино или на других контроллерах - это направление может принести множество нестандартных и интересных решений.