С точностью до минуты, конечно не засекал, но порядка 5 часов я на нем налетал. Что за это время произошло, какие были поломки, каких успехов удалось достичь и какие впечатления получить, читайте далее...
Так как опыта полетов на квадрокоптере у меня не было, в первых полетах Q-BOT вел себя как "Дикий мустанг", норовил вырваться на волю, что приводило к постоянным падениям. Время полета едва превышало несколько секунд. Не успев оторваться от земли, его несло в ту или иную сторону, а то и ввысь и потом сразу вниз, до удара о землю (вернее пол). Так длилось довольно продолжительное время, но как гласит авиамодельная мудрость, "Чтобы научиться летать - надо летать, летать и еще раз летать!".
Ура, висим стабильно
Если с самолетом (тем более, тренером) можно постепенно осваивать работу каналами, то тут на пилота сваливается сразу все 4 канала. То есть, двигать надо стиками, во всех направлениях. Но мало помалу, все приходит и вот уже коптер вполне стабильно висит, а количество падений начинает сокращаться.
Время полета - 12 минут
Так как я планировал подключить Q-BOT к аппе Turnigy 9x (прошивка er9x) и летать на ней, а стоковый пульт рассматривать как бесплатный бонус, опишу настройки с которыми я летаю.
Отлетав нормально (без постоянных падений) несколько аккумуляторов, среднее время полета составило 12 минут. В среднем за полет аккумулятор отдает 550мА. Ставим эту цифру на таймер.
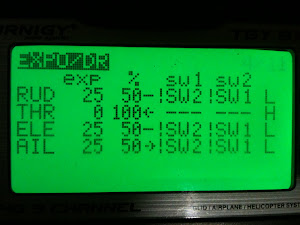
Вариантов расходов и экспонент сделал три (улица, помещение, акробатика), настроил их на трех-позиционный тумблер.
Для улицы расходы и экспоненты минимальные, так как там не требуется уворачиваться от стен и делать резких движений, а с большими расходами и на большом удалении коптер очень легко потерять.
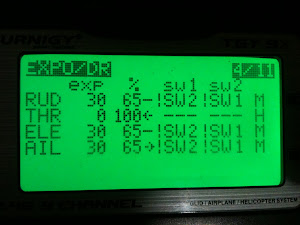
Для помещения значения расходов и экспонент побольше, потому как с маленькими коптер не успевает адекватно реагировать на команды, что так же приводит к авариям.
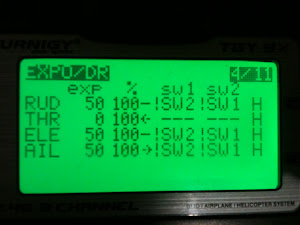
Ну и третий режим, акробатика, имеет полные расходы и большие экспоненты, что бы можно было делать перевороты. Баловство конечно, и этим режимом практически не пользуюсь, но пусть будет.
Так как при включении питания коптер проводит настройку гироскопов (на сколько я понимаю запоминает положение горизонта), а поверхность при этом далека от идеала, то контроллер получает каждый раз новые значения. Это приводит к тому что, казалось бы оттримированный в предыдущем полете коптер, опять начинает уводить в ту или иную сторону. Как вариант решения этой проблемы (при полетах в одном и том же месте), запомните место и положение коптера при включении, оттримируйте его и в дальнейшем подключайте на том же месте и в том же положении.
Поломки
За отчетное время коптер перенес два ремонта. Первой поломкой был отказ одного из двигателей. При осмотре сразу выявилась причина - слетела ведущая шестерня с вала мотора. Повезло, что случилось это в помещении, на улице найти ее мало вероятно. Ремонт не сложный, капля Циакрина на иголку, с помощью которой клей нанесен в отверстие шестеренки (тут главное не перелить, а то склеется все насмерть), которую сразу надел на вал мотора до упора.
Вторая поломка, отклеился один из лучей и вышел из подрамника. Тут тоже ничего сложного, капля универсального клея (я использовал клей UHU), вставил на место луч и оставил сохнуть.
Надо сказать, что Q-BOT оказался очень прочным, выдержав за это время несчетное количество падений и ударов он все еще цел и невредим. Даже еще не сломан ни один винт.
Балансировка винтов
Для пущей важности, решил проверить и при необходимости отбалансировать винты. Начал с тех, что шли в комплекте как запасные и те что купил дополнительно. Из восьми винтов, неотбалансированным оказался всего один. При проверке винтов на самом коптере, балансировка не потребовалась.
Методика тренировок
Освоив стабильное висение перед собой, стал вопрос: "Что дальше?" Полеты начали уже было казаться скучным занятием, НО! Стоило попробовать повернуть его к себе лицом, как оказалось, что коптер опять превращается в "Дикого мустанга". Да что там лицом, достаточно повернуть его боком к себе, как удержать его на месте становилось очень сложно. Понятно, надо методично осваивать его с каждой стороны, поворачивая его то одним боком к себе, то другим. Поворачивать начинал не сразу под 90 градусов, а сначала на 45, так оказалось проще. Между отработкой полетов боком, отрабатывал взлеты и посадки. А так же точные посадки, на импровизированную платформу. Как оказалось, посадить коптер на заранее определенное место не так просто. При приближении к поверхности создается воздушная подушка и коптер начинает уводить.
Ну и самым сложным оказалось, научиться висеть лицом к себе. Если коптер повернуть к себе боком во время полета, то его еще можно какое-то время контролировать, но при попытке повернуть его к себе лицом, "Дикий мустанг" сразу показывал свой норов, что непременно заканчивалось падением. В результате, я решил попробовать сразу взлетать к себе лицом и тут вспомнил, как пытался взлетать в самый первый раз. Эффект был тот же. Практически все попытки приводили к падениям, но тем не менее процесс шел, и мало помалу (как и при первых попытках начать на нем летать), начинало получаться. Ну а далее дело времени и практики.
Видео
Съемки любительские, к сожалению профессионального оператора под рукой нет, уж извините :)
Впечатления
Ну что я могу сказать. По моему, Q-BOT - отличный тренер начинающего коптеровода :) Может в нем и нет многих современных фишек продвинутых коптеров, но летать он вас точно научит. И самое главное - дешево и сердито!