| Проектирование авиамодели с ДВС (часть 7) |
| Изготовление авиамоделей - Разработка авиамоделей |
| Автор: Administrator |
|
Модель с ДВС. Проектируем и строим
Юрий Арзуманян (yuri_la) Часть VII
Для более высокой эффективности РН возможны различные решения. Например, развить вертикальное оперение вверх. В качестве примера можно привести Эдж. У меня есть такой самолет от Пилотажа. Итак, смотрим, сравниваем.
Рис. 62. Сравнение с Эджем от Пилотажа
А вот сравнение хвостового оперения. Ракурс фото немного искажает сравнение, но лучше не получается. Поскольку Эдж на заднем плане, то он кажется меньше, чем на самом деле.
Рис. 63. Сравнение вариантов киля с РН
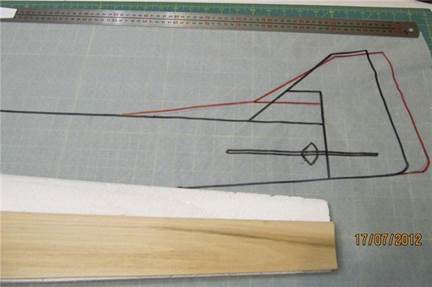
Справедливости ради надо отметить, что киль у Эджа значительно выше, хотя роговой компенсатор маленький, а форкиля вообще нет. Площади РН сопоставимы (у Эджа чуть больше), но у меня длиннее фюзеляж, следовательно, больше плечо, и, соответственно, момент управляющей силы по каналу рыскания. В итоге я слегка видоизменил вертикальное хвостовое оперение. Примерно будет выглядеть так, как на следующем фото.
Рис. 64. Измененная конфигурация киля с РН
Новые обводы показаны красным фломастером. То есть смотреться фюзеляж будет как-то так:
Рис. 65. Примерный вид фюзеляжа
Часто задают вопрос, почему на хвостовое оперение ставят более мощные машинки, чем на элероны, у которых даже площадь больше? Вот, кстати, на том же Эдже, который идет в комплектации RxR, то есть включено все, кроме приемника и батареи, сервомашинки хоть и запрятаны внутрь, но сервомашинка РН явно больше и мощнее других. Это видно по размерам качалки. Для ответа на поставленный вопрос надо рассмотреть полетные режимы модели, и какие при этих полетных режимах действуют нагрузки на рулевые поверхности, и какие конкретно рулевые поверхности максимально задействованы на этих режимах. Напоминаю, что мы строим что-то типа фана. Один из способов расчета усилия на сервомашинку изложен здесь: http://www.rcdesign.ru/articles/radio/servo_intro. Но он не единственный. Желательно проверить и по другой методике и выбрать худший случай для выбора машинки. Один из таких методов расчета приведу. А по вышеприведенной ссылке приводится формула из учебника по аэродинамике для расчета шарнирного момента рулевой поверхности. Кто захочет - прочитает статью целиком (рекомендую), а тем, кому важны только выводы, приведу отрывок здесь: "Пример оценки требуемого момента сервомашинки.
Прежде, чем дать методику оценки отметим, что в моделировании многие силовые расчеты прочности и управляемости основаны не на штатных режимах эксплуатации, а на стойкости к аварийным ситуациям. Поэтому многократные прочностной и силовой запасы весьма характерны для моделей. Теоретические основы расчета шарнирных моментов рулей самолета подробно описаны во многих учебниках по аэродинамике самолета. Мы воспользуемся монографией А.М. Мхитаряна "Аэродинамика". Шарнирный момент руля определяется по формуле: M=m*S*b*p*V^2/2 (стр. 358 монографии). Здесь обозначены: · S - площадь руля · b - хорда руля · p - плотность воздуха (0,125 кГ*сек^2/м^4 для стандартной атмосферы) · V - скорость полета · m - коэффициент момента Коэффициент момента зависит от угла отклонения руля и от угла атаки основной аэродинамической поверхности, на которой находится руль, то есть крыла для элеронов, киля для руля направления и стабилизатора для руля высоты. Поскольку нам нужно посчитать лишь максимальный требуемый момент, можно упростить данную зависимость и линейно аппроксимировать график (стр. 359 упомянутой монографии) простой формулой m=0,005d, где d - это угол максимального отклонения руля в градусах. При таком упрощении и пренебрежении зависимостью шарнирного момента от угла атаки погрешность расчета не превысит 30%, что вполне допустимо для оценочного расчета. Для удобства расчетов преобразуем размерность величин в формуле в удобную для использования. Итак, если площадь руля измерять в квадратных дециметрах, хорду руля в сантиметрах, скорость полета в километрах в час, угол отклонения руля в градусах, а получающийся шарнирный момент в граммах на сантиметр, то формула примет такой вид: М=0,00024*S*b*d*V^2. Для примера, рассчитаем момент, необходимый для управления рулем высоты типичной тренировочной модели самолета, задавшись следующими параметрами: площадь руля высоты - 2,5 кв. дециметра, хорда руля - 5 сантиметров, скорость полета 100 километров в час и угол отклонения - 20 градусов. Подставляя значения в формулу, получим: М=0,00024*2,5*5*20*100^2. Вычислив, получим М = 600 грамм на сантиметр, то есть 0,6 кГ*см. Вас, наверное, удивит такое маленькое значение. Чтобы пересчитать требуемый момент сервомашинки, надо учесть передаточное отношение силовой проводки, равное отношению плеча качалки сервомашинки к плечу кабанчика руля. Полученный в расчете шарнирный момент руля нужно умножить на это отношение. По нашему расчету получается, что даже с двукратным запасом на руль высоты такой модели подойдет типовая сервомашинка формата микро (0,6 кГ*см). И это действительно так. Но вот целесообразно ли это делать - здесь вступает в силу замечание, сделанное в начале главы". (автор Владимир Васильков)
Вот теперь имеем формулу и можем сравнить результаты расчета. Попробуем поработать с программкой ruddermoment3. Для примера можно ввести параметры от Цессны: скорость - модель летает примерно 40-50км/ч, значит пусть будет 15 м/с ширина крыла - 185 мм длина элерона - 320 мм ширина – 30 мм высота кабанчика - 16 мм высота качалки сервы - 12 мм Угол отклонения - примерно 20 градусов Ca – 0,5
Программа выдает результат – 0,8 Ncm.
Попробуем подставить эти значения в приведенную выше формулу. При этом скорость 15 м/с это 54 км/ч, S = 3,2 * 0,3; d = 20; b = 3. Да, еще надо учесть разницу в длине плеч качалки сервомашинки и кабанчика. То есть надо умножить результат на 16/12. Подставляя, получим: М = 0,00024*0,96*3*20*54^2 * (16/12) = 53,75 г*см.
Итак, сравниваем результаты. По программе rudermoment3 имеем 0,8 Ncm, то есть 81,55 г*см, а по формуле из статьи 53,75 г*см. Результат по программе rudermoment3 в полтора раза (81,55 / 53,75 = 1,52) выше. Порядок величин сходится, и если заложить запас по нагрузке (я обычно использую коэффициент запаса 1,3, и только в случае большой неопределенности величин - 1,5) то программа будет давать тот же результат, что и формула. Но я бы на этом не остановился, а попробовал еще какой-нибудь метод расчета. Для душевного спокойствия, так сказать. Надо заметить, что элероны на моделях, тем более небольших, редко имеют весовую компенсацию. Поэтому они слегка "обвисают" в свободном состоянии под действием собственного веса. А когда электроника подключена и сервомашинки "ожили", то они прикладывают некоторое усилие, чтобы их приподнять и удерживать в нейтральном положении. Это усилие мизерное, конечно, а отметил я это вот почему. В прямолинейном горизонтальном полете подъемная сила (повышенное давление на нижней поверхности крыла) наоборот, стремится приподнять элероны вверх, так как они являются частью крыла. И здесь их собственный вес слегка разгружает сервопривод. Если принять равномерное распределение давления по всей поверхности крыла, что не совсем верно, так как оно уменьшается к задней кромке, то можно вычислить нагрузку на элерон в таком режиме полета. Иными словами мы не учитываем разгружающее действие собственного веса элерона и то, что среднее давление на нем меньше среднего по крылу. Тогда получим: M = Gмодели * (Sэл/Sкр) *(b/2) С учетом длины плеч качалки и кабанчика получим момент примерно 34 г*см. Не так уж и мало! А если на такой скорости выполнить мертвую петлю радиусом 10 метров, то получим перегрузку Ny = 2,3. Добавляя к весу (то есть суммарно 3,3) получим нагрузку на сервопривод уже 112 г*см. Цифры сами по себе небольшие, но это для Цессны. Хорошо, что порядок величин не сильно расходится. Дальше прикину для своей модели. Заодно уж замечу, что сервомашинки элеронов лучше ставить снизу крыла, чтобы тяга тянула кабанчик элерона, а не толкала его. Ведь отклонить элерон вниз, как видим, требует усилия. А вверх ему отклониться помогает повышенное давление снизу крыла. Итак, по методике расчета, изложенной выше, получается, что для моей модели номинальная нагрузка на сервомашинку элерона равна примерно 515 г*см. То есть усилие уже выше полкилограмма. Если принять за максимальную перегрузку 4g, которую прикинул выше, и которую надо плюсовать к номинальной (по правде говоря это с хорошим запасом), то максимальное усилие на машинку будет уже 2,6 кг*см. А это уже не мало... Придется ставить эти сервомашинки: http://www.hobbyking.com/hobbyking/store/__6608__D_MG16_Metal_Gear_2_9kg_08sec_18_8g.html – с усилием 2,9 кг*см.
Рис. 66. Сервомашинки D-MG16
Чтобы закончить разговор о выборе сервомашинок, прошу посмотреть этот ролик с точки зрения работы управляющих поверхностей в полете. Сам наткнулся случайно: Там кадр в кадре. Обратите внимание, в частности, как недостаточно жесткий фюзеляж скручивает слегка при отклонении РН. Это то, чего я и хотел избежать, не желая развивать вертикальное оперение вверх. Я считаю полет на ноже расчетным случаем для оценки нагрузок на сервомашинку РН. И нагрузки здесь большие, потому что лететь приходится чуть ли не на полном газу с отклоненным РН. Это объясняется тем, что в таком положении самолет держится в воздухе за счет двух факторов. Первый - это тяга двигателя. И нужно ее направить вверх под некоторым углом, чтобы была проекция вектора тяги на вертикальную ось. Значит, нужно приложить приличное усилие, чтобы удерживать модель в таком положении. Второй фактор - подъемная сила от боковой поверхности модели. Она зависит как от площади этой поверхности, так и от ее формы. Для коротких тупомордных фюзеляжей самолетов типа Эджа, Экстры и им подобных, скорость полета должна быть приличной, чтобы хоть какая-то подъемная сила была создана. Кроме того, момент инерции самолета вокруг вертикальной оси (по рысканию) значительно больше такового вокруг поперечной оси (по тангажу). Отсюда усилие для маневра в вертикальной плоскости (т.е. на РВ) необходимо меньше, чем по курсу. Что касается элеронов, то момент инерции по крену тоже достаточно большой, а к тому же большой момент демпфирования. (Попробуйте "помахать крыльями" вашей модели, держа ее в руках.) Но при расчете усилия на сервомашинку элерона не нужно закладывать в расчет и большую скорость, и большой угол отклонения. Для фанов они "рядом не ходят". Иначе расчетная нагрузка (сила, вызванная набегающим потоком) получится много больше веса модели. Перегрузки при этом получаются зашкаливающие. Легкий и ажурный фан при таких перегрузках просто развалится в воздухе, как будто наткнулся на стену на полной скорости. Думаю, этот вопрос можно считать исчерпанным. Продолжение в следующей части. |